
Procédures IFR
A partir du grade ![]() et programme examen du grade
et programme examen du grade ![]() et supérieurs
et supérieurs
A partir du grade ![]() et programme examen du grade
et programme examen du grade ![]() et supérieurs
et supérieurs
1. Présentation des procédures IFR
Une procédure aux instruments est un ensemble de trajectoires basées sur un ou plusieurs moyens radioélectriques et destinées aux aéronefs volant en IFR.
On distingue :
- Les procédures de départ
- Les procédures d'arrivée
- Les procédures d'approche aux instruments
- Les procédures d'attente
Une procédure est basée sur un ou plusieurs moyens radioélectriques (procédures conventionnelles) ou repères (procédures RNP ou GPS). Elles sont destinées aux aéronefs volant en IFR.
Une procédures est composée de plusieurs segments correspondant à des phases successives du vol. Chaque phase est délimitée par deux bornes appelées repères (FIX).
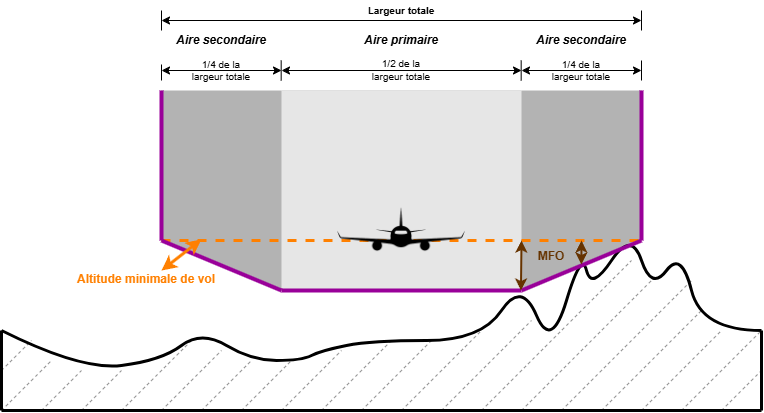
A chaque segment de procédure est associée une aire de protection, servant à déterminer les obstacles pénalisants. Une marge de franchissement d'obstacles (MFO), appliquée à ceux-ci permet de déterminer une altitude/hauteur donc le respect garantit au pilote, en l'absence de références visuelles, une utilisation sûre de la trajectoire. Pour les phases d'arrivée, les MFO sont décroissantes, au fur et à mesure que l'on se rapproche de la piste. Pour les phases de départ, les MFO sont croissantes au fur et à mesure que l'on s'éloigne de la piste. Ces MFO sont réparties entre deux aires, l'aire primaire et l'aire secondaire, mais nous ne les détaillerons pas plus que ça dans cette fiche.
Un repère est matérialisé par :
- Un moyen radioélectrique de navigation (VOR, NDB, ILS) ;
- L'intersection de deux moyens radioélectriques de navigation (intersection entre deux radiales, ou entre une radiale et une distance DME) ;
- Un FIX défini par ses coordonnées géographiques.
2. Procédures de départ
Le départ est la portion du vol menant de l'aérodrome de départ jusqu'au premier point de la phase en-route.
2.1 Types de départs
On distingue 2 types de départs :
- les itinéraires normalisés de départ aux instruments (SID), qui sont publiés sur les cartes aéronautiques ;
- les départs omnidirectionnels, qui sont publiés sur les cartes aéronautiques, ou décrits dans une clairance par un organisme de contrôle de la circulation aérienne.
2.1.1 SID
Les itinéraires de départs normalisés ou Standard Instrument Departure (SID) sont établis en espace aérien contrôlé. Ce sont des routes ATS par laquelles les aéronefs peuvent passer. Cette procédure est représentée et décrite sur les cartes aéronautiques.
Les SID sont organisés dans le but d'accélérer de manière sûre et efficace le flux de trafic opérant au départ :
- d'une même piste, ou ;
- de pistes différentes sur le même aérodrome, ou ;
- des aérodromes voisins.
Les SID visent à éliminer les potentiels conflits en utilisant des itinéraires, des contraintes d'altitude/de niveaux de vol et des restrictions de vitesse. L'équipage doit se conformer aux restrictions à moins que ces dernières ne soient explicitement annulées ou modifiées par l'ATC. Ils sont établis en espace aérien contrôlé.
Ils sont désignés en général par :
- un nom (généralement celui du dernier point de la procédure de départ)
- un chiffre (de 1 à 9 ; le chiffre est incrémenté de 1 à chaque modification de la procédure)
- une lettre (représentatif de la version de la procédure de départ : piste, catégorie d'appareil...)
Il existe 2 types de SID :
- SID CONV (conventionnel)
- SID RNAV
2.1.2 SID conventionnel
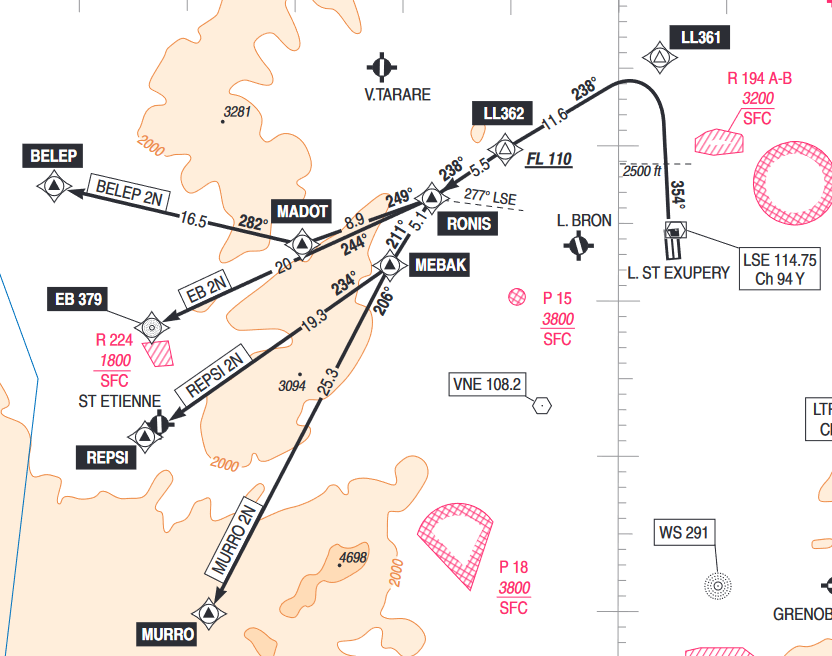
Un SID conventionnel est un SID où la méthode de navigation utilisée consiste à se servir des moyens de radionavigation (radiale VOR, distance DME, NDB...).
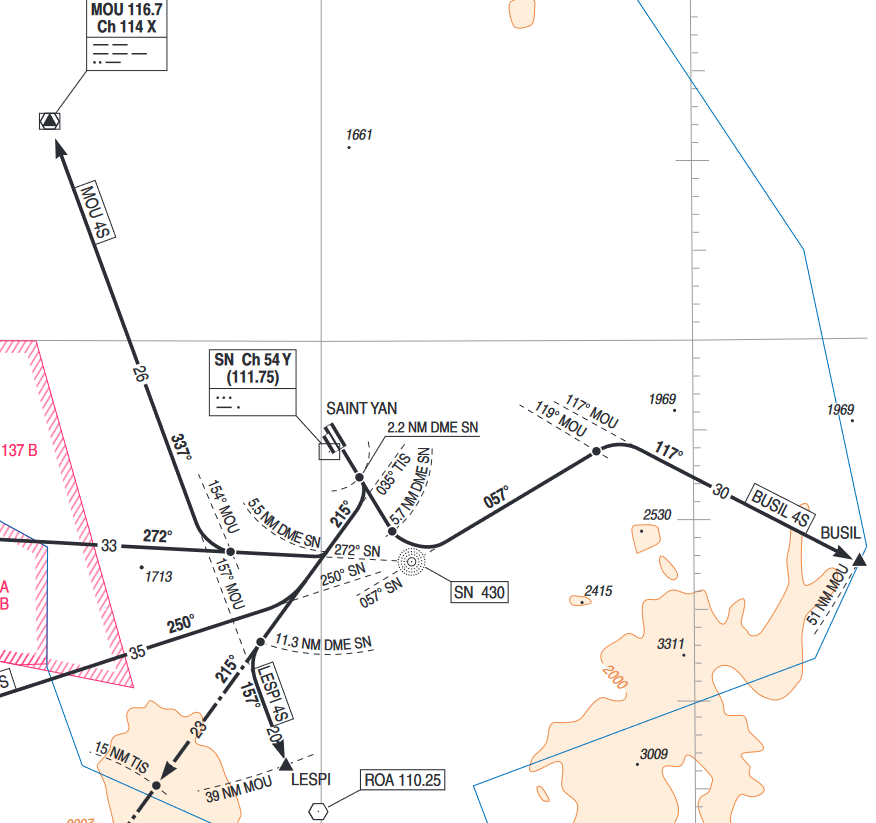
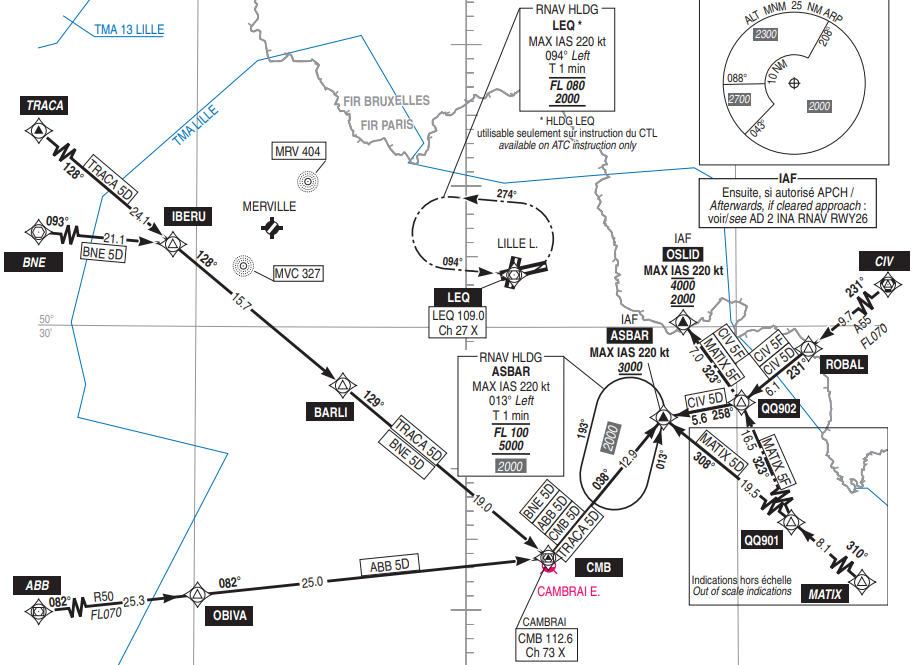
SID CONV sur l'aéroport de Saint Yan (LFLN)
2.1.3 SID RNAV
2.1.4 Départ omnidirectionnel
Sur de nombreux aérodromes, aucun SID n'est publié. C'est le cas notamment des aérodromes situés en espace aérien non contrôlé. Néanmoins, il peut y avoir au voisinage de l’aérodrome des obstacles ayant une incidence sur les départs et une procédure de départ omnidirectionnelle est un moyen d’assurer le franchissement d’obstacles.
Il existe 2 catégories de départs omnidirectionnels :
- Type A : départ en ligne droite suivant une route spécifiée jusqu'à une altitude/hauteur spécifiée à partir de laquelle on peut effectuer un départ omnidirectionnel ou par secteur ;
- Type B : départ suivant une trajectoire spécifiée jusqu'à un repère, puis départ omnidirectionnel ou par secteur.
La trajectoire des départs omnidirectionnels peut être publiée sur une carte aéronautique ou prescrite par l'ATC.
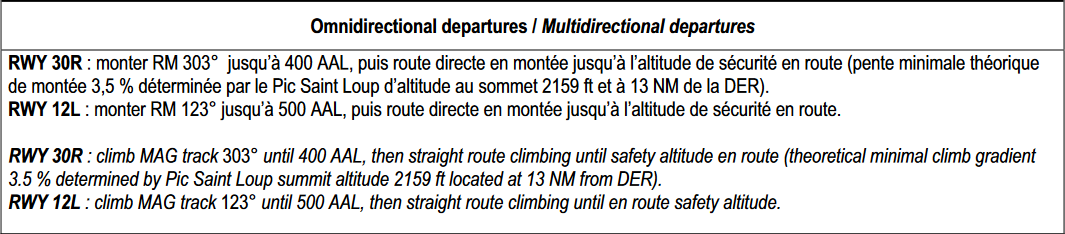
Départs omnidirectionnels publiés sur l'aéroport de Montpellier (LFMT)
2.2 Définition et construction
La procédure de départ commence à l'extrémité départ de la piste ou DER (Departure End of Runway) qui correspond, selon le cas, à l'extrémité de la piste ou du prolongement dégagé (limite déclarée pour le décollage ou TODA) et finit au premier point en‐route.
Un départ est dit :
- En ligne droite, lorsque la trajectoire initiale de départ fait un angle maximal de 15° avec le prolongement de la piste.
Exemple départ LFPG : DIKOL5H, RANUX5H

- Avec virage lorsque la trajectoire initiale de départ fait un angle supérieur à 15° avec le prolongement de la piste.
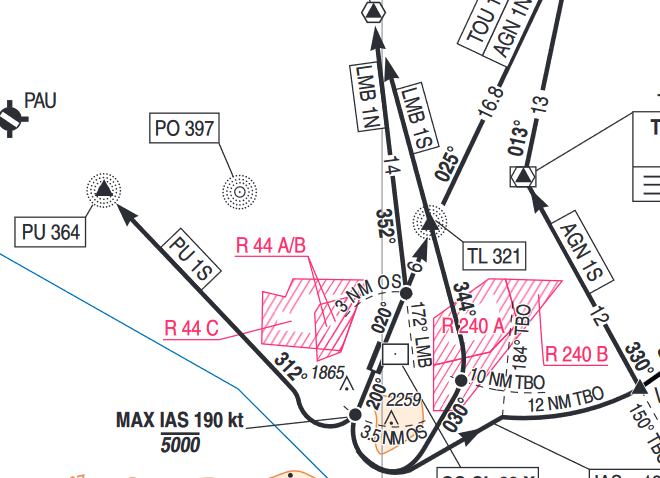
Exemple départ LFBT : PU1S, LMB1S
On distingue deux types de virages :
- Le virage initial commencé à une hauteur inférieure ou égale à 300m (984ft) au dessus de la DER, dans le cas d'un virage à une altitude/hauteur, ou à un TP (point de virage) désigné situé à une distance inférieure ou égale à 3.2 NM de la DER. En règle générale, aucun virage ne sera initié en dessous de 400ft AAL.
Exemple départ LFRS : ANG3Q, LUSON3Q
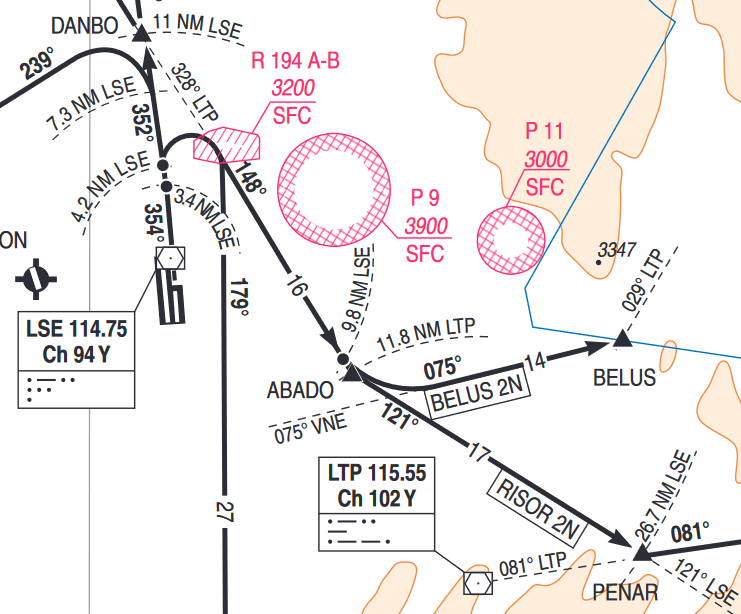
- Le virage après montée initiale commencé à une hauteur supérieure à 300m (984ft) au dessus de la DER, dans le cas d'un virage à une altitude/hauteur ou à un TP désigné situé à une distance supérieure à 3.2 NM de la DER.
Exemple départ LFLL : BELUS2N, RISOR2N
Pour la construction des procédures, on admet que l'aéronef reste en ligne droite jusqu'à une hauteur minimale de 400ft au dessus de la DER
Aucun virage n'est supposé être effectué à moins de 600m du début de la piste
L'angle d'inclinaison est limité à 15° pour un virage initial. Ce type de virage est protégé pour un vent non corrigé de 30kt (MFO=165ft). Pour les autres virages, cet angle est limité à celui correspondant au taux standard ou à 25° si la vitesse est supérieure à 170kt.
Pour les virages, les vitesses maximales indiquées ci dessous devront être prise en compte :
| Catégorie appareil | Virage initial | Virage après montée initiale |
| CAT A | V=120kt | V=120kt |
| CAT B | V=145kt | V=165kt |
| CAT C | V=175kt | V=265kt |
| CAT D | V=205kt | V=290kt |
| CAT E | V=255kt | V=305kt |
Cela ne dispense pas de la réduction de vitesse imposée sur les procédures et réduction de vitesse à 250kts en-dessous du FL100
Sur une procédure de départ, la pente de montée minimale à respecter est de 3.3% (sauf indication contraire)
2.3 Procédures moindre bruit
Parfois, les procédures de départ sont accompagnées de procédure moindre bruit pour des raisons de protection environnementale. Les procédures de moindre bruit sont décrites dans une fiche dédiée.
3. Procédures d'arrivée
Un itinéraire standard d'arrivée aux instruments (STAR) est une route ATS identifiée par laquelle les aéronefs passent pour relier le dernier point en-route à l'un des IAF (Initial Approach Fix), point de départ de la procédure d'approche. Cette procédure est représentée et décrite sur les cartes aéronautiques.
Sur certains aérodromes, il n'existe pas de STAR : le raccordement entre le dernier point en-route et l'IAF se fait par l'intermédiaire d'un guidage radar ou d'un direct.
Les STAR sont organisées dans le but d'accélérer le flux de trafic d'une manière sûre et efficace opérant à l'arrivée de la même piste ou de pistes différentes sur le même aérodrome ou sur des aérodromes voisins.
Les aéronefs IFR doivent se conformer à une procédure d'arrivée aux instruments donnée dans une clairance avant le dernier point en route. Ces procédures peuvent être publiées ou non.
3.1 Types d'arrivées
On distingue 2 types d'arrivées :
- les routes spécifiées d'arrivées (STAR)
- les arrivées omnidirectionnelles
3.1.1 STAR
Les STAR sont établies en espace aérien contrôlé. L'altitude minimale publiée sur ces trajectoires assure une marge de franchissement d'obstacle (MFO) de 1000ft (2000ft en région montagneuse) dans un couloir de 5NM de part et d'autre de la trajectoire nominale. Si un arc-DME est utilisé, il est à au moins 10NM du DME.
Les STAR sont désignées par :
- un nom (généralement celui du premier point de la procédure d'arrivée) ;
- un chiffre (de 1 à 9 ; le chiffre est incrémenté de 1 à chaque modification de la procédure) ;
- une lettre (représentatif de la version de la procédure d'arrivée : piste, catégorie d'appareil...).
Il existe 2 types de STAR :
- STAR CONV (conventionnelle)
- STAR RNAV
3.1.1.1 STAR conventionnelle
Une STAR conventionnelle est une STAR où la méthode de navigation utilisée consiste à se servir des moyens de radionavigation (radiale VOR, distance DME, NDB...).
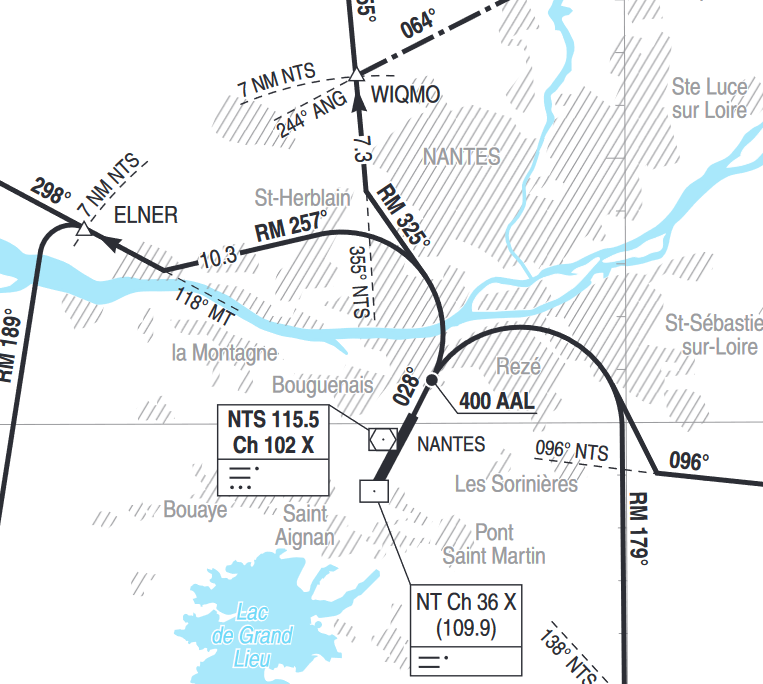
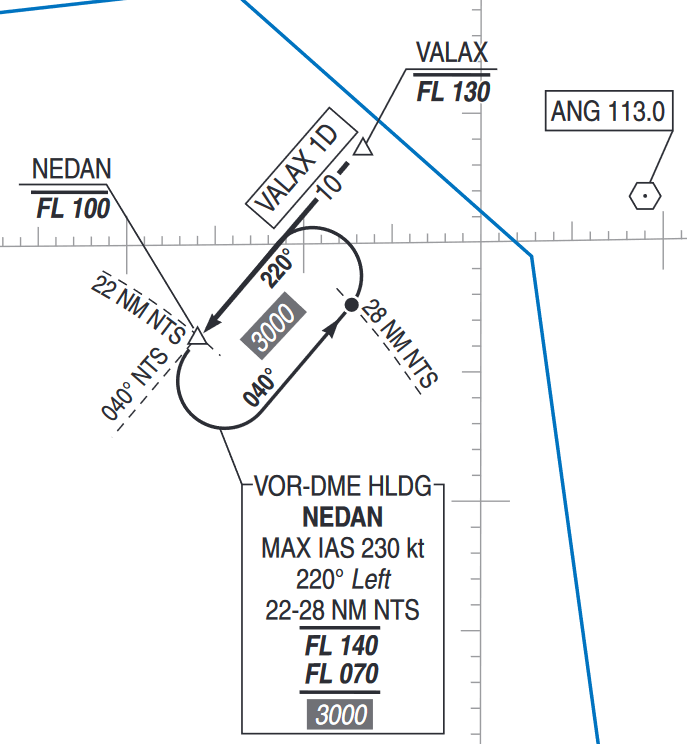
Exemple de STAR CONV sur l'aéroport de Nantes Atlantique (LFRS) : VALAX1D est l'arrivée ayant pour origine le point VALAX
3.1.1.2 STAR RNAV
3.1.2 Arrivée omnidirectionnelle
Lorsqu'aucune route n’est spécifiée, il est alors possible d'utiliser n'importe quelle route (en fonction des clairances reçues si le vol a lieu en espace aérien contrôlé ou à la discrétion du commandant de bord en espace aérien non contrôlé). Une altitude minimale doit être respectée afin de garantir le franchissement des obstacles.
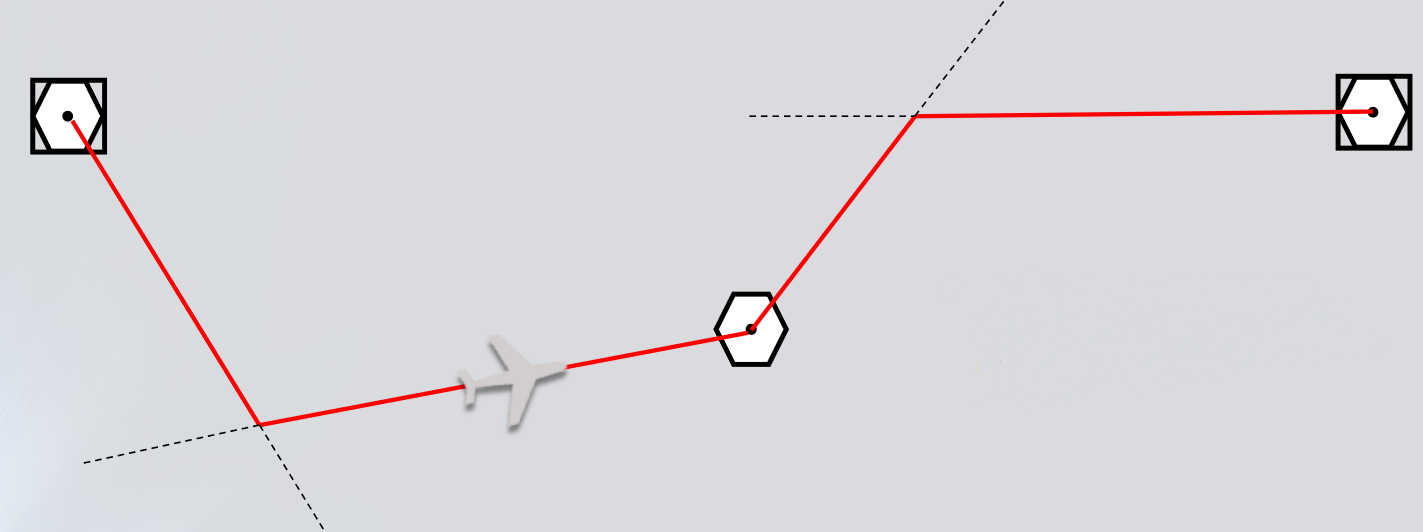
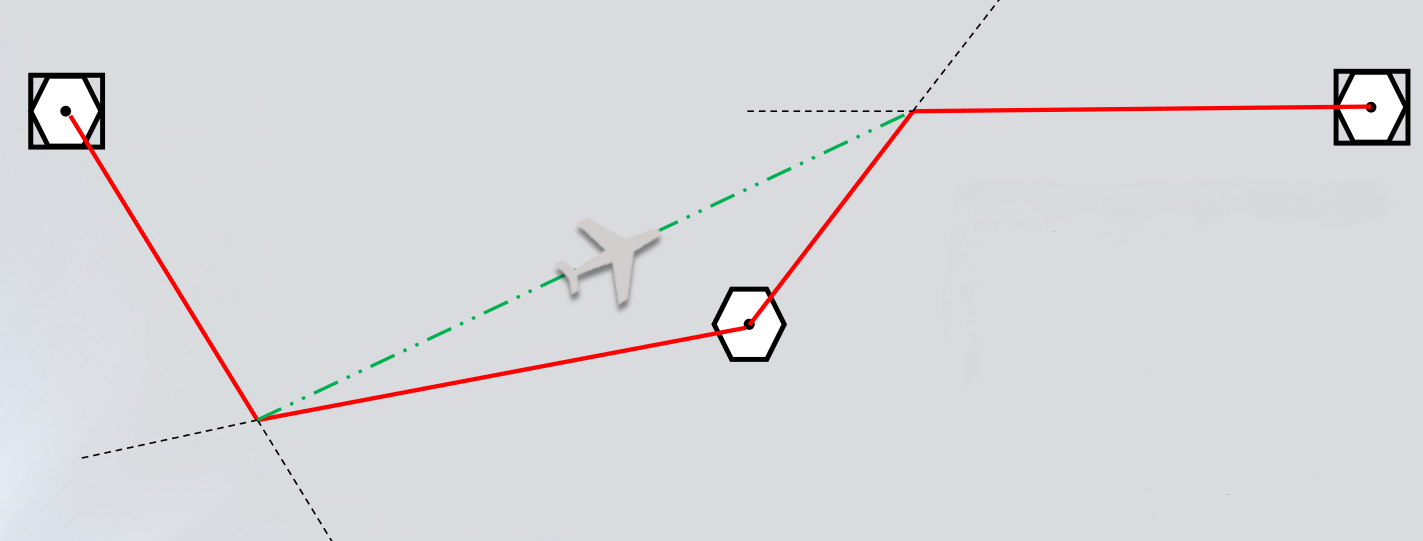
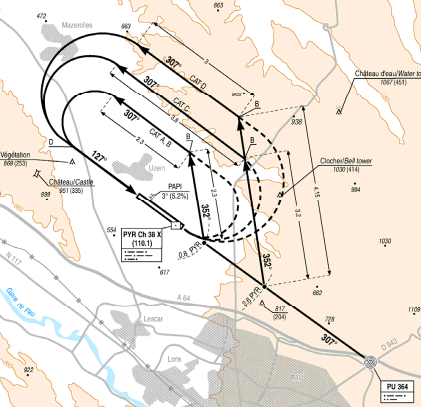
3.1.3 Route spécifiée
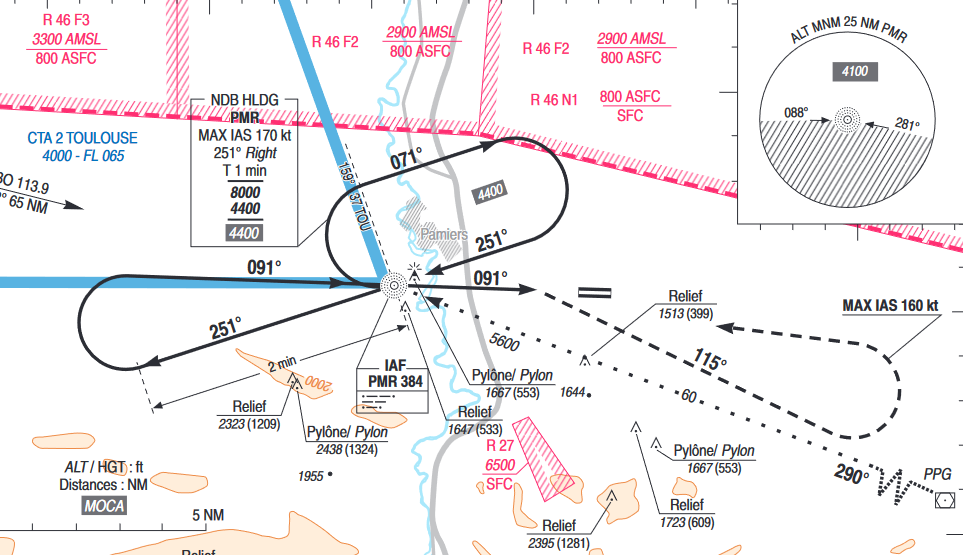
Exemple de trajectoire d'arrivée sur l'aéroport de PAMIERS LES PUJOLS LFDJ (trajectoire en pointillées)
4. Procédures d'approche
4.1 Types d'approche
4.1.1 Terminologie
4.1.1.1 Approche de précision / non précision
On distingue :
- approche de non précision : fournit un guidage latéral continu uniquement (VOR, NDB, LNAV...)
- approche de précision : fournit un guidage latéral continu et un guidage vertical continu (ILS, PAR, GLS...)
- approche APV : approche avec guidage vertical mais ne réunissant pas tous les critères pour être désignée comme étant une approche de précision
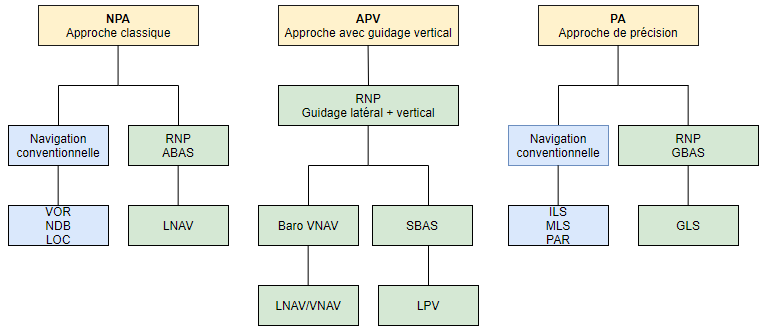
Une notion assez explicite existe, celle des approches 2D et 3D :
- Toutes les approches de non-précision sont 2D
- Toutes les approches de précision sont 3D
- Les approches RNP sont soit 2D soit 3D
4.1.1.2 Approche de type A / type B
On distingue :
- approche type A : DH ≥ 250ft
- approche type B : DH < 250 ft
Les approches type B sont séparées en 3 catégories :
| Catégorie | DH | RVR |
|---|---|---|
| CAT I | 250ft > DH ≥ 200ft | RVR ≥ 550m (ou VIS ≥ 800m) |
| CAT II | 100ft ≤ DH < 200ft | RVR ≥ 300m |
| CAT III |
DH < 100ft ou pas de DH | RVR ≥ 175m |
| DH < 50ft ou pas de DH | 50m < RVR ≤ 175m | |
| Pas de DH minimum | Pas de RVR minimum |
L'ancienne terminologie des CAT III faisait mention de CAT IIIa/IIIb/IIIc. Cette terminologie a disparu au profit d'une simplifiée sans mention de lettres mais simplement définie par les minima associés.
4.1.1.3 Approche CDFA / non CDFA
Historiquement, un avion effectuant une approche de non précision descend, sans pente d'approche donnée ("dive and drive"), vers une altitude minimale et s'y met en palier jusqu'à un point appelé MAPt (Missed Approach Point). Si les références visuelles sont insuffisantes pour poursuivre jusqu'à l'atterrissage en arrivant au MAPt, une remise de gaz est effectuée. On parle d'approche non CDFA.
Cette technique d'approche comporte plusieurs inconvénients :
- Charge de travail augmentée (changements d'assiette et de puissance) ;
- Puissance requise pour le palier à basse hauteur (plus de bruit, consommation augmentée) ;
- Le palier implique une assiette plus à cabrée (mauvaise visibilité devant l'avion pour voir la piste) ;
- Si le MAPt est proche du seuil de piste, il y a un risque de sortie de piste.
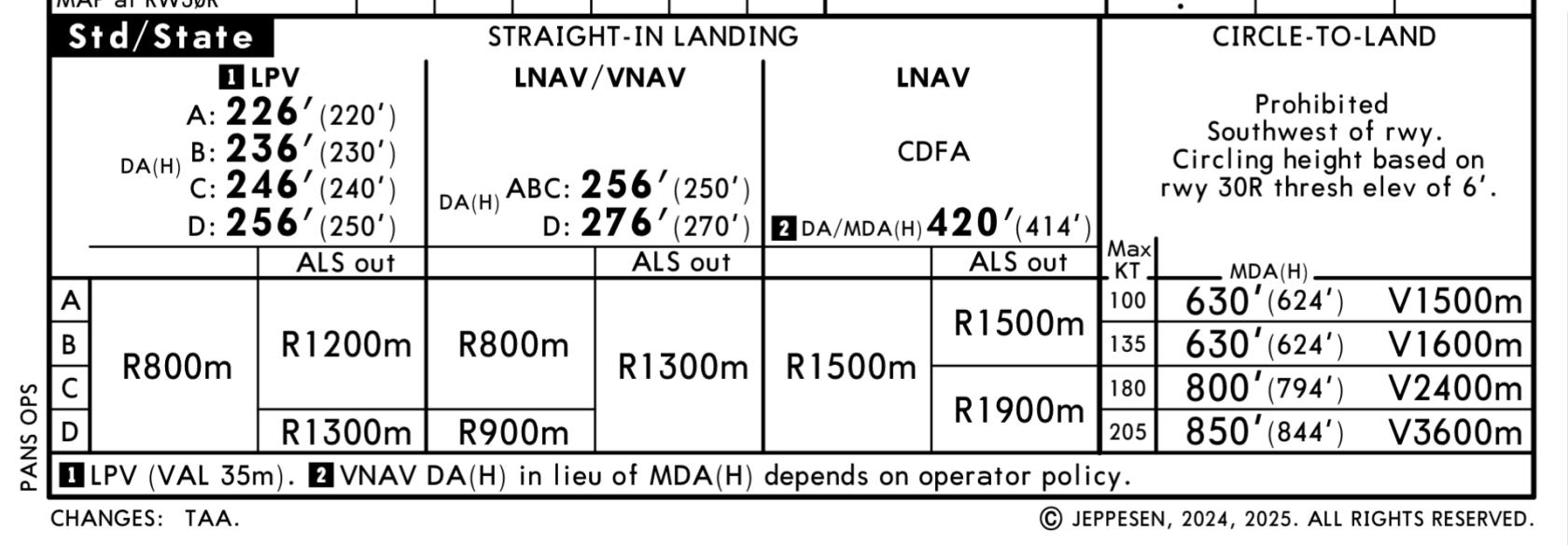
Pour s'affranchir de ces inconvénients et augmenter la sécurité, de nos jours, la majorité des approches classiques s'utilisent en adoptant la technique CDFA (Continuous Descent Final Approach). L'avion suit la pente d'approche et remet les gaz aux minimums (DA/DH) si les références visuelles sont insuffisantes pour poursuivre jusqu'à l'atterrissage.
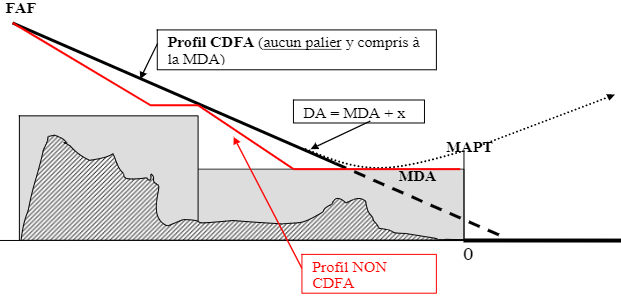
Contrairement à la DA/DH, la MDA/MDH n’est pas conçue pour passer en dessous lors de la remise de gaz.
Il faut alors ajouter une marge afin de prendre en compte l'inertie de l'avion pendant la remise de gaz lors de l'éxecution d'une approche 2D CDFA (sauf cas particuliers). Cette marge est définie par chaque opérateur en fonction du type d'opération réalisées.
Les éditeurs de cartes précisent les cas dans lesquels ces corrections doivent s’appliquer :
Historiquement, la DGAC recommandait ces valeurs :
-CAT A : 20ft
-CAT B : 30ft
-CAT C : 40ft
-CAT D : 60ft
Dorénavant ce sont les opérateurs qui les définissent si nécessaire.
4.1.1.4 Différence entre DA et MDA
- DA = Decision Altitude = sur une approche 3D (ou suivie en tant que telle avec la technique CDFA), altitude à laquelle le pilote décide de remettre les gaz s'il n'a pas acquis les repères visuels nécessaire à la poursuite de l'approche.
- MDA = Minimum Descent Altitude = altitude en dessous de laquelle le pilote ne peut pas descendre sans avoir acquis les repères visuels nécessaires à la poursuite de l'approche.
Cette différence s'explique car sur une approche 3D la position de l'appareil est directement comparée avec le plan théorique à suivre. De fait il est donc plus précis d'estimer sa position verticale par rapport aux obstacles. Sur une approche 2D, il n'est pas possible de connaître avec précision la position de l'appareil sur le plan vertical.
Il ne faut pas confondre DA et DH, et MDA et MDH. Concrètement :
- La MDH n'est pas utilisée ;
- La MDA est utilisée sur les approches 2D, et entrée en tant que minima dans l'avion comme "BARO", car elle se base sur l'altimètre de l'avion ;
- La DA est utilisée sur les approches 3D CAT I, et entrée en tant que minima dans l'avion comme "BARO" ;
- La DH est utilisée sur les approches 3D CAT II et CAT III , entrée en tant que minima dans l'avion comme "RADIO", car elle se base sur le radioaltimètre de l'avion.
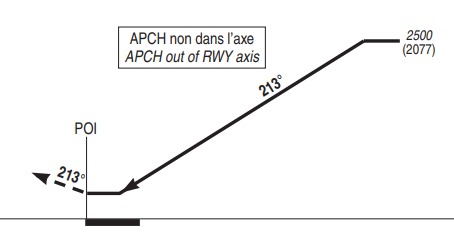
4.1.1.5 Approche directe / indirecte / non dans l'axe
On distingue :
- Approche directe : l'axe de percée fait un angle ≤30° (CAT A&B) ou ≤15° (CAT C,D) avec l'axe de piste et présente à 1NM du seuil un écart latéral ≤150m par rapport à l'axe de piste ;
- Approche indirecte : toute autre approche qu'une approche directe. À l'issue de cette approche, une manoeuvre à vue est nécessaire pour atterrir ;
- Approche non dans l'axe : approche directe pour laquelle l'axe de percée n'est pas confondu avec l'axe de piste.
4.2 Segments des procédures d'approche aux instruments
Une procédure d'approche est une suite de plusieurs segments entre lesquels peuvent s'intercaler des procédures d'attente et/ou une manœuvre à vue (imposée ou libre).
On distingue :
- L'approche initiale ;
- L'approche intermédiaire ;
- L'approche finale ;
- L'approche interrompue.
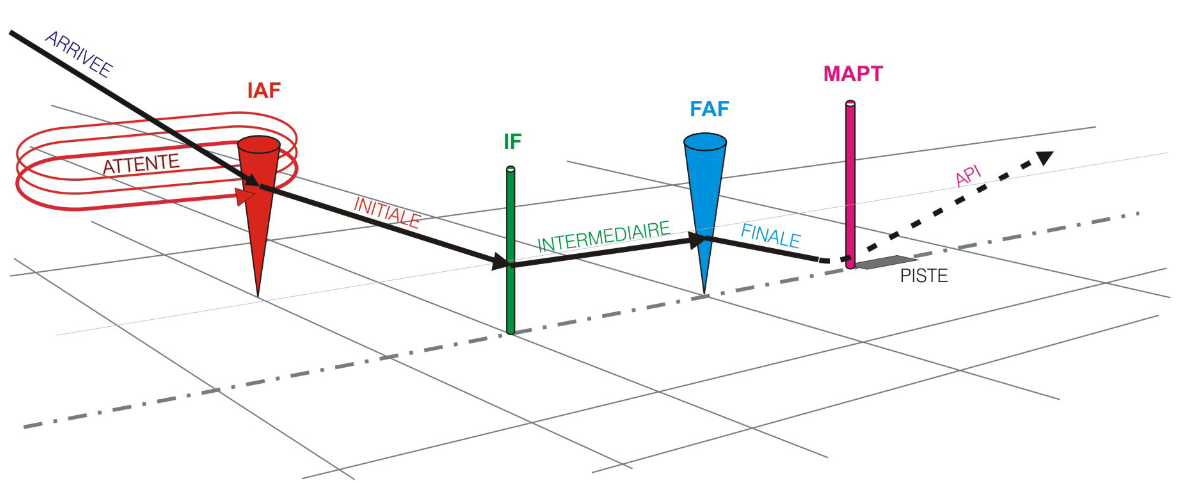
4.2.1 L'approche initiale
L'approche initiale sert à positionner l'avion sensiblement dans l'axe de percée (axe d'approche finale).
L'approche initiale débute à l'IAF (Initial Approach Fix) et se termine à l'IF (Intermediate Fix), ou à la sortie du virage de procédure si l'IF n'est pas matérialisé (approche VOR sans indication de distance par exemple).
En espace aérien contrôlé, une approche ne peut pas être commencée sans clairance ATC
Si aucune autorisation d'approche n'a été émise avant l'IAF, un circuit d'attente doit être effectué (sauf consigne particulière). L'IAF est un point de clairance limite.
L' IAF sert généralement comme repère d'attente.
Sur ce segment, la marge de franchissement d'obstacles (MFO) est de 1000ft.
L'approche initiale peut être composée d'une procédure d'inversion (virage de base ou virage conventionnel) ou d'un hippodrome. Ces deux notions sont décrites plus tard sur cette fiche.
Sur certains aérodromes il existe une liste définie d'approches initiales permettant de relier les STAR aux différentes approches. Elles peuvent être conventionnelles ou RNAV et sont nommées "transitions". L'équipage devra donc préparer la chronologie suivante dans le système de navigation utilisé (GNSS, FMS...) : STAR -> transition -> approche
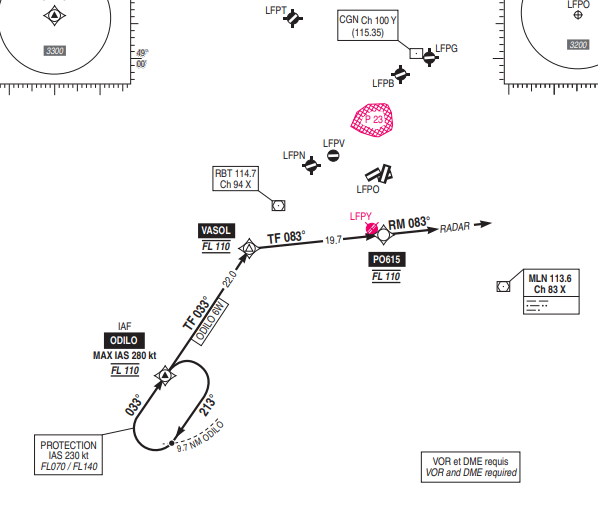
Exemple de la transition ODILO 6W sur LFPO
4.2.2 L'approche intermédiaire
L’approche intermédiaire permet de se préparer à l'approche finale (vitesse et configuration de l'aéronef).
En général, la longueur du segment est prévue pour assurer 30 secondes de vol à la vitesse d'approche initiale. La marge de franchissement d'obstacle (MFO) est de 500ft.
On distingue 3 cas :
- cas d'une approche classique avec FAF : l’approche intermédiaire débute à l’IF (Intermediate Fix) ou à la fin du virage d'inversion ou à la fin du virage de procédure et se termine au FAF (Final Approach Fix)
- cas d'une approche classique sans FAF : ce segment n’existe pas
- cas d'une approche de précision avec FAP : l’approche intermédiaire débute à l’IF ou à la fin du virage d'inversion ou du virage de procédure et se termine au FAP (Final Approach Point)
- FAF : repère matérialisant le début de la descente sur les approches classiques (souvent une distance ou une balise)
- FAP : point matérialisant le début de la descente sur les approches de précisions (intersection entre l'altitude de procédure et la pente de descente)
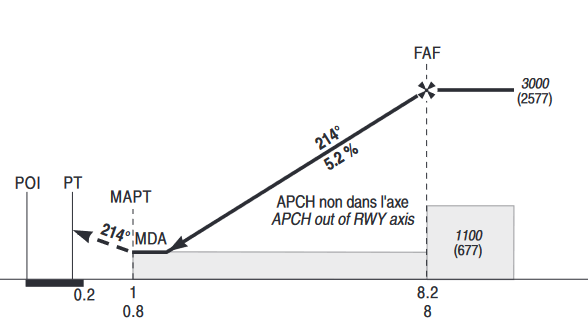
4.2.2.1 Approche classique avec FAF
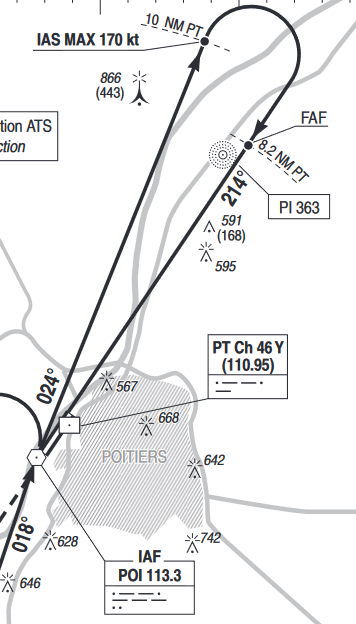 Approche VOR Z (avec FAF) piste 21 sur LFBI
Approche VOR Z (avec FAF) piste 21 sur LFBI
4.2.2.2 Approche classique sans FAF
 Approche VOR (sans FAF) piste 21 sur LFBI
Approche VOR (sans FAF) piste 21 sur LFBI
4.2.3 Approche finale
L'approche finale permet la descente de l'avion vers l'aérodrome en vue de l'atterrissage.
On distingue plusieurs cas :
- Approche classique avec FAF : l'approche finale débute au FAF et se termine au MAPt (Missed Approach Point) ;
- Approche classique sans FAF : l'approche finale débute à la fin du virage d'inversion et se termine au MAPt ;
- Approche de précision : l'approche finale débute au FAP et se termine lorsque nous atteignons la hauteur/altitude de décision (DH ou DA) sur le plan de descente.
Pour un aéronef qui effectue une approche finale selon la méthode CDFA, la notion de palier disparaît car la technique de descente continue permet de ne pas effectuer un palier jusqu’au MAPt
Le plan est idéalement compris entre 5.2% (3°) et 6.5% (aéronefs CAT A&B) ou 6.1% (aéronefs CAT C&D) au maximum. Sur certains terrains, des plans beaucoup plus important sont présents et nécessitent une préparation préalable.
MAPt : point où le pilote doit débuter, au plus tard, la procédure d'approche interrompue si les références visuelles sont insuffisantes pour poursuivre l'atterrissage
La descente finale ne peut être entreprise que si l'écart de la position de l'avion par rapport à l'axe d'approche est inférieures aux limites suivantes :
±10° pour une approche NDB
±5° pour une approche VOR
Localizer actif (axe localizer non en butée) pour une approche ILS
4.2.4 Approche interrompue
Toute procédure comporte une trajectoire d'approche interrompue (API) utilisée lorsqu'il s'avère impossible de poursuivre l'approche jusqu'à l'atterrissage. Cette trajectoire prend fin à l’altitude/hauteur suffisante pour permettre :
- L’exécution d’une nouvelle approche ou,
- Le retour à un circuit d’attente désigné ou,
- Le raccordement à la phase en-route
- Dans le cas des approches classiques : un MAPt est défini.
Pour un aéronef descendu à la MDA/MDH selon la technique non CDFA, c'est la limite aval à laquelle le pilote doit remettre les gaz pour débuter l’approche interrompue.
Pour un aéronef qui effectue une approche finale selon la méthode CDFA, la notion de palier disparaît car la technique de descente continue permet de na pas effectuer de palier jusqu’au MAPt.
Lorsqu’une approche interrompue est initiée et comporte un virage à une altitude, celui-ci n’est pas effectué avant le MAPt.
- Dans le cas d'une approche de précision : l'approche interrompue débute au point où l'on atteint la DA/DH sur le plan de descente
L'étude de la procédure d'approche interrompue retient l'hypothèse d'une pente minimale de montée fixée à 2.5 %.
Dans certains cas, notamment lorsque des obstacles contraignants pénalisent la trajectoire, des minimums d'approche supplémentaires calculés à partir d'une pente supérieure peuvent être publiés. Cependant quelles que soient les pentes supplémentaires calculées, les minimums calculés avec une pente API = 2.5 % sont publiés.
L'approche interrompue peut être définie, soit en ligne droite, soit avec un virage prescrit en un point de repère, ou à une altitude.
4.2.4.1 Approche interrompue en ligne droite
L'approche interrompue est considérée en ligne droite lorsqu'elle se fait selon la même route magnétique que celle de l’approche finale et lorsque aucun virage n'est prescrit avant que l'aéronef n'ait atteint une altitude de sécurité.
4.2.4.2 Approche interrompue avec point de virage spécifié
Un virage doit être exécuté, quelque soit l'altitude atteinte au point de virage (Turning Point - TP) spécifié sur la carte d'approche. Le virage ne doit être débuté ni avant ni après ce point.
4.2.4.3 Approche interrompue avec virage à une altitude spécifiée
Une altitude est spécifiée pour le virage de retour vers le repère d'attente. Le virage ne doit être débuté ni en dessous, ni au-dessus de cette altitude. Toutefois, dans certains cas, il est précisé de ne pas tourner avant un repère.
En cas de panne d'un moteur, certains avions peuvent avoir à effectuer un palier d'accélération avant de poursuivre la montée. Une hauteur minimale d'accélération en palier est normalement calculée. Lorsqu'il est prévu, le palier est calculé pour une longueur maximale de 6NM (catégorie A&B) et, si possible, 10NM (catégorie C&D). La montée est, à l'issue du palier, calculée pour une pente minimale de 1%. Dans le cas d'une approche interrompue avec virage à une altitude/hauteur, la hauteur minimale d'accélération publiée est au moins égale à la hauteur du virage.
Lorsqu’aucune mention particulière n'est portée sur la carte, cela signifie qu'aucune possibilité d'effectuer un palier n'a été étudiée
4.3 Suivi d'une approche finale
4.3.1 Approche de précision
Les corrections de cap doivent se faire par rapport au cap moyen estimé. La descente ne peut être poursuivie que si le localizer et le glide sont à moins d'une demi-déviation. Toute excursion au delà de ces valeurs doit conduire à une remise de gaz.
4.3.2 Approche de non précision
Le pilote doit maintenir en permanence un écart angulaire inférieur à :
- 10° pour une approche NDB
- 5° pour une approche VOR
Le taux de descente est déterminé à partir de la vitesse sol avec le plan de descente théorique
Voir "calcul de pente" sur la fiche calcul mental et formules
4.4 Commencement et poursuite d'une approche
La réglementation en vigueur pour commencer/poursuivre une approche dépend du type d'opération.
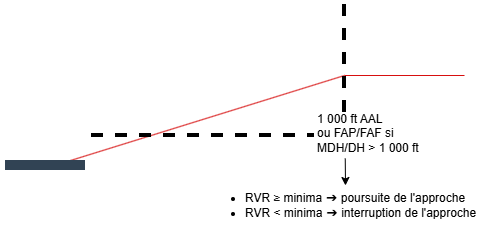
CAT.OP.MPA.305
(a) Pour les avions, si la visibilité reportée ou la RVR déterminante pour la piste utilisée pour l'atterrissage est inférieure au minimum applicable, alors une approche aux instruments ne doit pas être continuée :
(1) après un point auquel l'avion est 1000ft au dessus de l'aérodrome ; ou
(2) dans le segment d'approche finale si la DH ou la MDH est supérieure à 1000ft.
[...]
(c) si la référence visuelle requise n'est pas établie, alors une approche interrompue doit être executée à ou avant la DA/H ou la MDA/H.
(d) si la référence visuelle n'est pas maintenue après la DA/H ou la MDA/H, alors une remise de gaz doit être exécutée sans délai.
(e) nonobstant le point (a), dans le cas où aucune RVR n'est reportée et que la visibilité reportée est inférieure au minimum applicable mais que la visibilité météorologique convertie (CMV) est supérieure ou égale au minimum applicable, alors l'approche aux instruments peut être continuée jusqu'à la DA/H ou MDA/H.
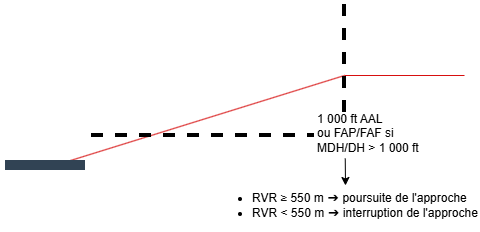
NCO.OP.210
(a) Si la RVR déterminante pour la piste utilisée pour l'atterrissage est inférieure à 550m (ou toute autre valeur inférieure établie en adéquation avec une approbation sous SPA.LVO), alors une approche aux instruments ne doit pas être continuée :
(1) après un point auquel l'avion est 1000ft au dessus de l'aérodrome ; ou
(2) dans le segment d'approche final si la DH ou la MDH est supérieure à 1000ft.
(b) si la référence visuelle requise n'est pas établie, alors une approche interrompue doit être executée à ou avant la DA/H ou la MDA/H.
(c) si la référence visuelle n'est pas maintenue après la DA/H ou la MDA/H, alors une remise de gaz doit être exécutée sans délai.
4.5 Manœuvre à vue
Une manœuvre à vue est effectuée lorsque :
- l’atterrissage a lieu sur une piste différente de celle utilisée pour la percée ;
- l’axe d’approche finale diffère trop de l’axe de la piste pour être considéré comme une approche directe.
On distingue deux types de manœuvres à vue : circling et VPT
Une manœuvre à vue est différente d'une approche à vue.
- manœuvre à vue : manœuvre effectuée avec des références visuelles extérieures, à l'issue d'une approche aux instruments ;
- approche à vue : manœuvre effectuée avec des références visuelles extérieures, avant d'avoir débuté une approche aux instruments.
4.5.1 Circling
Un circling (Manœuvre à Vue Libre - MVL) est une évolution libre aux abords de l'aérodrome. Ces évolutions peuvent être limitées à des catégories d'aéronefs en fonction des pistes à desservir et des obstacles présents aux abords de l'aérodrome.
Un secteur peut être interdit pour une MVL afin d'éviter la prise en compte d'obstacles pénalisants dans le calcul de la MDH
Le volume de l'aire de protection est défini en traçant à partir du seuil de chaque piste, un arc de cercle de rayon R, dépendant de la catégorie de l’avion, et en prolongeant ceux-ci par des tangentes.

Lorsqu'un secteur de l'aire MVL est interdit, une réduction appropriée de l'aire est appliquée en conséquence.
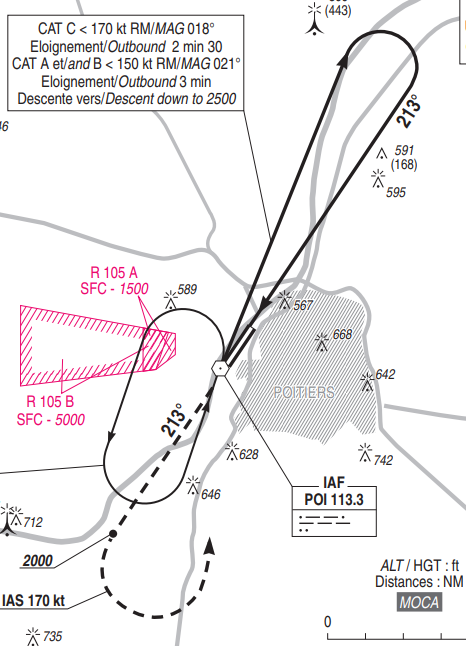
4.5.2 VPT
Une VPT (Visual pattern with Prescribed Track) est une manœuvre à vue imposée effectuée à l'issue d'une procédure d'approche aux instruments, et suivant une trajectoire définie à l'aide de repères visuels ou radioélectriques. Les trajectoires peuvent être différentes selon la catégorie d’aéronef.
4.6 Approche à vue
Attention : il ne faut pas confondre approche à vue et manœuvre à vue. Une approche à vue est menée par un aéronef en IFR, après autorisation du contrôle, lui permettant de devenir maître de sa trajectoire. La définition d'une manoeuvre à vue est détaillée plus haut.
Voici la réglementation applicable :
AMC1 SERA.8005 c)
a) Sous réserve des conditions énoncées au paragraphe (b), l’autorisation pour un aéronef en vol IFR d’exécuter une approche à vue pourra être demandée par un équipage de conduite ou par le contrôleur. Dans ce dernier cas, le consentement de l’équipage de conduite devrait être requis.
b) Un aéronef en vol IFR devrait être autorisé à effectuer une approche à vue seulement si le pilote peut garder le sol en vue et :
1) si le plafond signalé se trouve au niveau où commence le segment d’approche initiale approuvé pour cet aéronef, ou plus haut ; ou
2) si, au niveau où commence le segment d’approche initiale ou à tout moment pendant la procédure d’approche aux instruments, le pilote signale que les conditions météorologiques sont telles qu’il y a tout lieu de croire qu’une approche et un atterrissage à vue sont possibles.
c) Sauf entre les aéronefs effectuant des approches visuelles successives, tel que décrit au paragraphe (d), la séparation devrait être assurée entre un aéronef autorisé à effectuer une approche à vue et les autres aéronefs à l’arrivée et au départ.
d) Dans le cas d’approches à vue successives, le contrôleur devrait maintenir une séparation jusqu’à ce que le pilote de l’aéronef qui suit signale qu’il voit l’aéronef qui précède. Il devrait recevoir alors l’instruction de suivre cet aéronef et d’assurer lui-même la séparation.
e) Dans le cas d’aéronefs effectuant des approches visuelles successives et ayant reçu l’instruction d’assurer eux-mêmes la séparation comme indiqué au paragraphe (d) et le cas où la distance entre les aéronefs est inférieure au minimum approprié en fonction de la turbulence de sillage, le contrôleur devrait émettre une mise en garde concernant la possibilité de turbulence de sillage.
Résumé :
- L'approche à vue est demandée par le pilote ou proposée par l'ATC ;
- Pendant une approche à vue, l'aéronef continue à bénéficier des services rendus aux IFR, notamment la séparation vis-à-vis des autres IFR. Si un IFR effectue une approche à vue derrière un autre aéronef effectuant la même manœuvre, il devient alors responsable de la séparation vis-à-vis de ce dernier une fois le contact visuel établi ;
- Pour les ATC : une coordination systématique avec la TWR est nécessaire avant d'approuver une approche à vue.
4.7 Procédure d'inversion et hippodrome
Une procédure d'inversion permet à l'avion de faire demi‐tour sur le segment d'approche initiale de façon à se positionner sur l'axe de percée.
On distingue :
- virage de base
- virage conventionnel (45°/180° et 80°/260°)
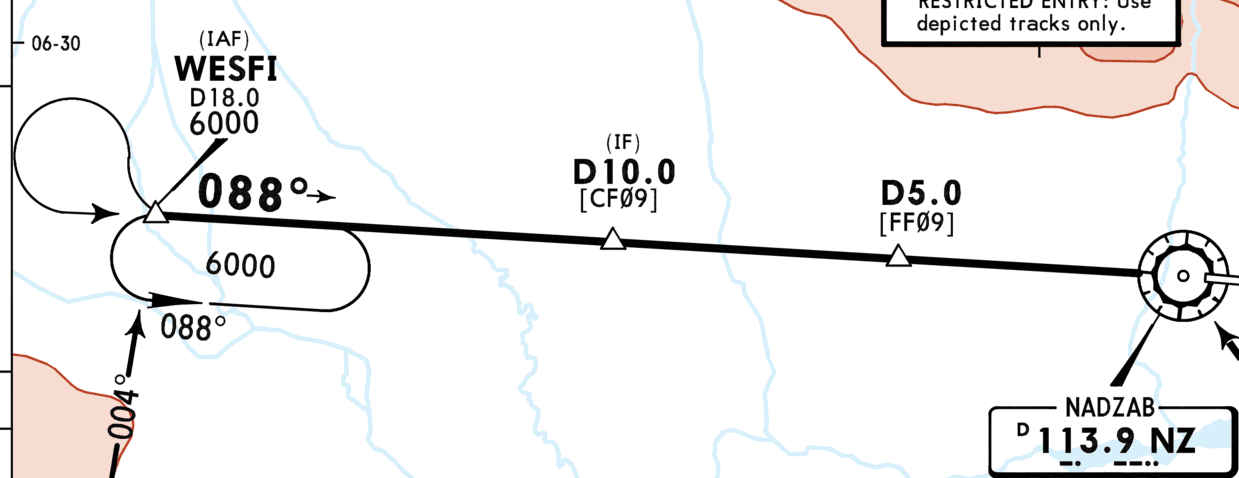
4.7.1 Le virage de base
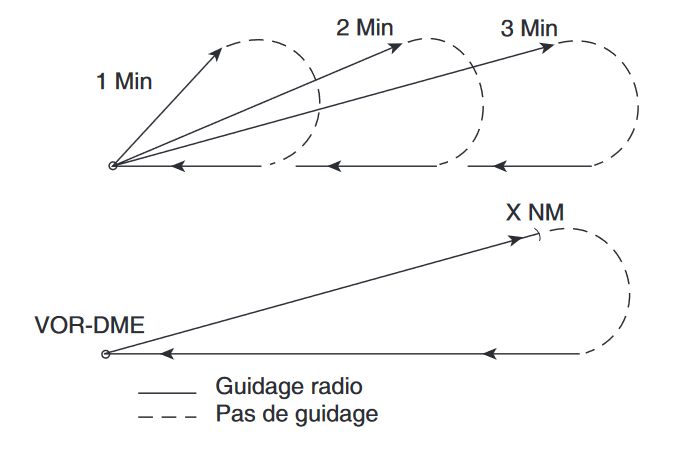
Un virage de base est effectué à partir de la verticale d'une aide radioélectrique.
Il consiste en :
- une phase d'éloignement sur un axe spécifié pendant un temps spécifié, jusqu'à un repère spécifié, ou une distance DME
- un virage pour revenir sur l'axe
- une phase de rapprochement suivant un axe
Le point de départ d'un virage de base est la verticale d'une installation radioélectrique. L'éloignement est défini en temps T et est mesuré au passage du repère ou à l'aide d'un repère de fin d'éloignement. En fonction de l'altitude à perdre, le temps d'éloignement sera plus ou moins long, normalement compris entre 1 et 3 minutes.
L'angle de divergence est déterminé à partir du rayon de virage d'un avion évoluant à la vitesse de protection de la procédure. En fonction de la catégorie d'appareil, les procédures ne sont pas les mêmes pour assurer une bonne réalisation de ces dernières en fonction des vitesses caractéristiques des appareils en approche
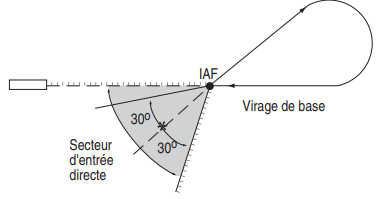
L'entrée dans le virage de base ne peut s'effectuer que si la route d'arrivée de l'aéronef fait un angle de moins de 30° avec la route d'éloignement du virage de base. Pour les cas d'entrée à plus de 30°, l'entrée dans le virage de base doit s'effectuer à l'issue du circuit d'attente
4.7.2 Virage conventionnel (45°/180° ou 80°/260°)
Le virage conventionnel 45°/180° consiste en :
- une altération de route à 45° pour une temps T de 1 minute (sans vent) pour les avions de catégorie A et B et 1 minute et 15 secondes (sans vent) pour les avions de catégories C,D,E ou jusqu'à un repère spécifié
- un virage à 180° pour revenir intercepter l'axe de percée
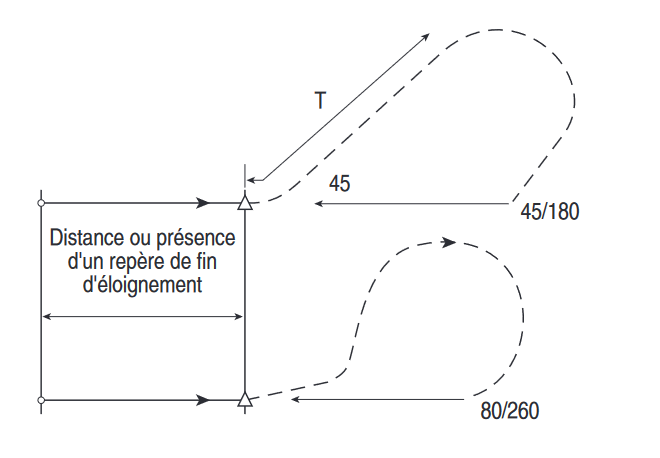
Le virage conventionnel 80°/260° consiste en :
- un virage à 80° suivi d'un virage à 260° dans l'autre sens pour revenir intercepter l'axe de percée
L'entrée dans le virage conventionnel ne peut s'effectuer si la route de l'aéronef fait un angle de moins de 30° avec la route d'éloignement
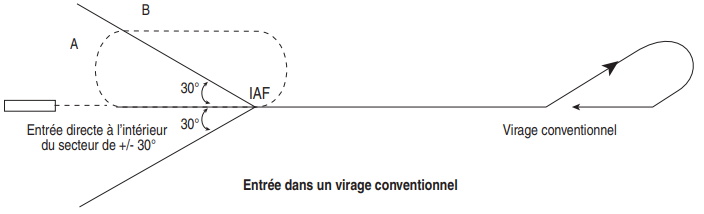
Les virages conventionnels sont dits à gauche ou à droite selon la direction du virage initial. Le temps T est mesuré à partir de l'instant de mise en virage
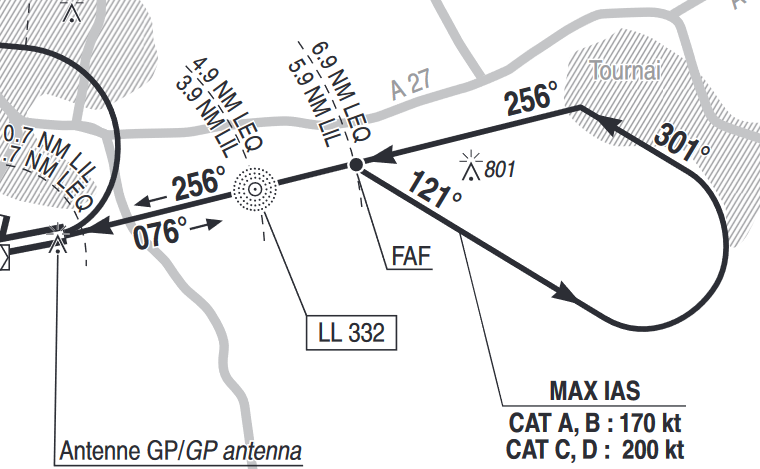
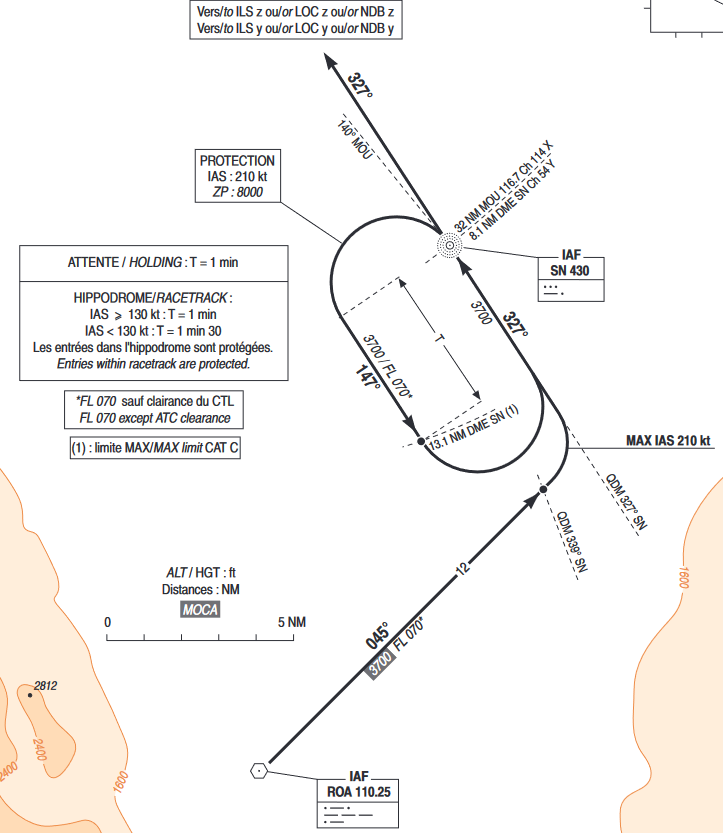
4.7.3 Hippodrome
L'hippodrome (ou racetrack en anglais) et le circuit d'attente peuvent être confondus (même trajectoire, même altitude...) ou séparés.
Comme un circuit d'attente, un hippodrome est constitué de 2 branches rectilignes raccordées par deux virages de 180°.
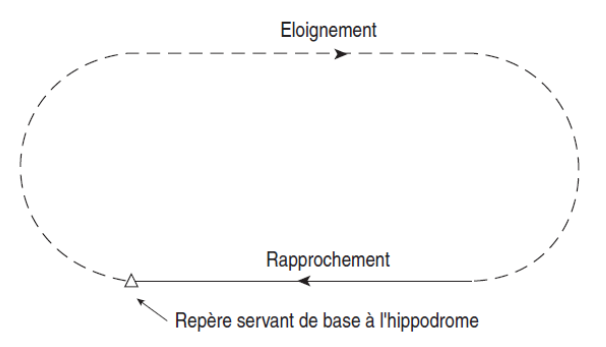
Le circuit d'hippodrome permet à un avion de rejoindre :
- Le début de l'approche finale d'une approche classique ;
- Le début de l'approche intermédiaire d'une approche de précision ;
- Le début d'une procédure d'inversion.
L'hippodrome peut être défini par un temps d'éloignement ou une distance DME imposée.
Ne pas confondre circuit d'attente et hippodrome
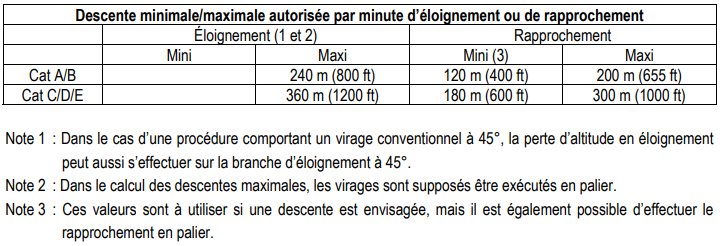
4.7.4 Descente sur les procédures d’inversion et hippodromes
Le tableau suivant décrit les descentes sur les procédures d'inversion et dans un hippodrome par minute d'éloignement ou de rapprochement.
5. Intégration dans la circulation d'aérodrome
5.1 Aérodrome contrôlé
- S'intégrer dans la circulation d'aérodrome conformément aux clairances délivrées par l'ATC.
5.2 Aérodrome non contrôlé
5.2.1 Avec agent AFIS
- S'il effectue une procédure d'approche directe, s'intégrer directement en approche finale (en fonction du trafic) ;
- Si une manoeuvre à vue imposée est possible et nécessaire compte tenu des conditions météorologiques, s'intégrer directement sur la trajectoire publiée ;
- Si une manoeuvre à vue libre est possible et nécessaire compte tenu des conditions météorologiques, s'intégrer dans la circulation d'aérodrome en respectant, sauf consigne particulière publiée, les règles d'intégration définies pour les VFR (sens et hauteur minimale du tour de piste). Si les conditions météorologiques le permettent, la descente devra être interrompue à une hauteur supérieure au plus haut des circuits d'aérodrome publiés pour la piste en service, à moins que l'aérodrome ne soit accessible qu'aux aéronefs équipés de radio, et qu'aucun autre aéronef n'évolue dans la circulation d'aérodrome.
5.2.2 Sans agent AFIS
- Effectuer la manoeuvre à vue libre, en respectant les règles d'intégration définies pour les VFR. Si les conditions météorologiques le permettent, la descente devra être interrompue à une hauteur supérieure au plus haut des circuits d'aérodrome publiés pour la piste en service.