RNAV
A partir du grade grade ![]()
et programme examen du grade grade ![]()
et supérieurs
A partir du grade grade ![]()
et programme examen du grade grade ![]() et supérieurs
et supérieurs
1. Introduction
Les équipements embarqués utilisent les moyens de navigation suivants afin de de déterminer la position de l'aéronef :
- Horloge
- GNSS (Global Navigation Satellite System)
- INS/IRS (Inertial Navigation
System/InternialSystem / Inertial Reference System) - ADC (Air Data Computer)
- VOR/NDB/ILS
Plusieurs avantages grâce à la RNAV : Gain de temps de vol, procédures flexibles, coûts d'entretiens réduits
2. Waypoint (WPT)
Un waypoint (point de cheminement) est une une position géographique utilisée pour définir une route RNAV ou la trajectoire de vol d'un aéronef utilisant la RNAV.
Ils sont définis par leurs leurs coordonnées géographiques (latitude/longitude) et nommés selon un code :
- à
- à
solsol (ex: CAD) - alphanumérique
terminalesterminales (ex: PN617)
Ces WPT peuvent être survolés s ("fly -over") ou légèrement contournés s ("fly-by") pour rejoindre la branche suivante de la route. Sur les cartes, les symboles sont différents.
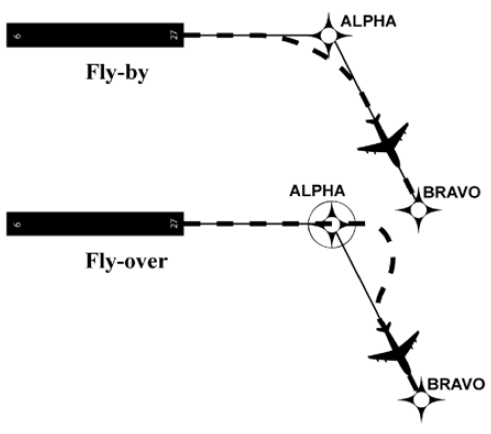
Certains points comme les MAPt sont toujours définis comme "fly over"
La réglementation européenne fixe les rayons applicables en cas de virage sur un "fly-by".
3. Précision de la navigation
Une spécification RNAV "X" signifie qu'un aéronef doit être capable d'atteindre une précision supérieure à "X" NM pendant pendant 95% du vol.
"RNAV 5" : précision supérieure à 5NM pendant 95% du vol
On distingue :
La RNAV 5 est utilisée en Europe depuis 1998 et obligatoire pour les
volsvols IFR au dessus du FL115 depuis 2001
Les systèmes de surveillance doivent assurer
lala capacité à détecter toute défaillancede calcul ou de capteurs
4. Opérations
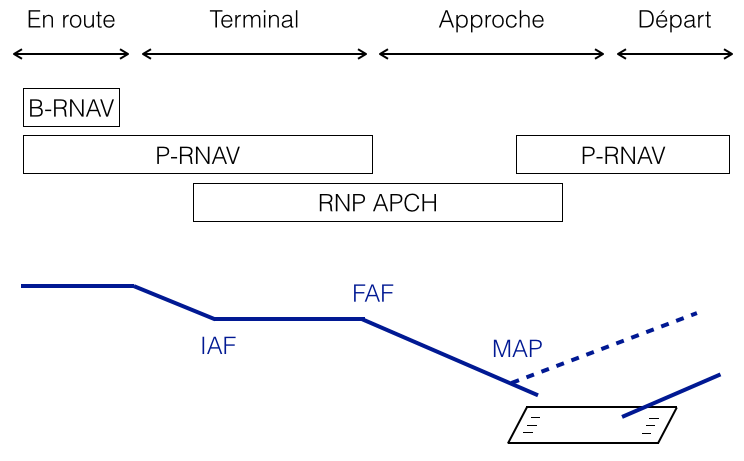
4.1 En-route
Les opérations rations en-route sont assujetties à la spécification cification RNAV 5 (B-RNAV).
Les senseurs approuvés sont les suivants :
- VOR/DME ;
- DME/DME ;
GNSSGNSS.
4.2 Terminal
Les opérations en phase phase terminale sont assujetties à la spécification cification RNAV 1 (P-RNAV).
Les senseurs approuvés sont les suivants :
- DME/DME ;
GNSSGNSS.
4.3 Systèmes d'augmentation
Afin d'augmenter la précision (et parfois l'intégrité), on dispose de de systèmes d'augmentation :
4.3.1 ABAS
Le concept concept ABAS (Aircraft ircraft Based ased Augmentation ugmentation System) repose sur deux systèmes :
-
RAIM (R
eceivereceiver Autonomousutonomous Integrityntegrity Monitoring) qui permet de détecterunle signal défectueux d'un satellite et de lenégligermettre de côté s'il y a suffisament d'autres satellites présents.sents ; -
AAIM (A
ircraftircraft Autonomousutonomous Integrityntegrity Monitoring) qui permet de comparer le positionnement GNSS à celui d'une autre source (DME/DME, VOR/DME, etc.).
Quel que soit le système utilisé, l'ABAS permet de garantir l'intégrité du positionnement GNSS ; en revanche, il n'améliore pas sa précision.
4.3.2 SBAS
SBAS (Satellite atellite Based ased Augmentation ugmentation System) est un système qui calcule et diffuse des corrections pour les différentes sources d'erreur affectant les positions transmises par les satellites GNSS : écarts sur l'heure, la position du satellite et l'impact de l'la ionosphère. Les SBAS permettent d'améliorer la précision de la position fournie par les systèmes GNSS en la portant à 1 ou 2 mètres.
Il repose sur des stations terrestesterrestres qui déterminent ces erreurs en mesurant l'écart entre la position fournie par les satellites et leur position réelle. Des corrections sont alors calculées en temps réel et renvoyées à des satellites géostationnaires qui les diffusent vers les récepteurs GNSS équipés pour recevoir ces messages.
Différents systèmes SBAS répondant à des normes internationales, ont été développés ou sont en cours de développement dans les différentes régions du monde : WAAS sur le continent américain, EGNOS en Europe...
4.3.3 GBAS
Le système me GBAS (Ground round Based ased Augmentation ugmentation System) repose sur des corrections calculées et transmises par des équipements terrestres. A l'échelle locale, dans un aéroport, des récepteurs GNSS de référence envoient des données à un système central. Ces données sont utilisées pour former un message de correction, qui est alors transmis automatiquement aux aéronefs par l'intermédiaire d'une liaison de transmission de données VHF. Un récepteur embarqué dans l'avion utilise cette information pour corriger les signaux GNSS, et peut alors fournir un affichage standard type ILS qui est utilisé pour réaliser une approche de précision.
Plus d'informations sur ces différents moyens d'augmentation sur cette page
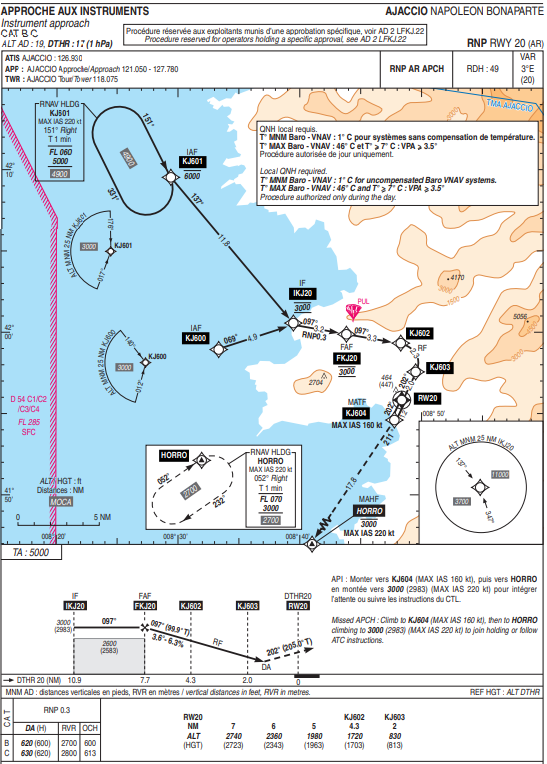
4.4 Approches
Les procédures d'approche font l'objet d'un "concept RNAV amélioré" : RNP (Required equired Navigation avigation Performance). Détaillé dans la partie partie PBN, le GNSS est supposé être le senseur.
Les Les approches RNP :
Approche RNP-AR : les approches RNP AR (A
uthorizationuthorization Required) sont un standard d’approche plus précis que les approches RNP classiques (0.3NM à 0.1NM de précision contre 0.3NM pour les RNP). Elles peuvent comprendre des courbes de type RF (Radiustoto Fix) et permettent des marges de franchissement d'obstacle réduites. Les appareils et équipage doivent être certifiés