Théorie du fonctionnement de l'ILS
1. INTRODUCTION
Introduction
L’ILS (Instrument Landing System) est un système automatique d’aide à l’atterrissage, utilisé dans l'aviation
civile. Il permet une approche de précision compatibles avec des conditions météorologiques dégradées, en
offrant un guidage dans les plans vertical et horizontal jusqu’au seuil.
L’ILS comprend :
- Un système de guidage horizontal appelé LOCALIZER ;
- Un système de guidage vertical appelé GLIDE SLOPE ;
- Un système d’identification par code morse attaché au
glideglide.
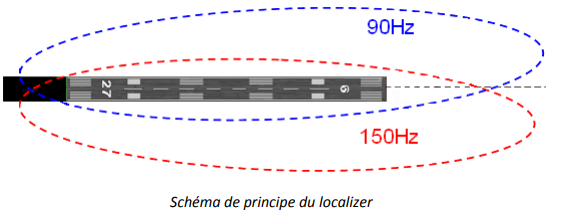
Le localizer fournit les informations de guidage dans le plan horizontal. Ce dernier émet, grâce à un réseau
d’antennes directrices situées dans le prolongement de la piste, un faisceau radioélectrique permettant de
fournir au pilote une indication d’écart horizontal par rapport à l’axe de piste.
Le glide slope ou appelé simplement glide fournit au pilote une information d'écart par rapport au plan de
descente. Il émet des faisceaux radioélectriques dans le prolongement de l’axe de piste permettant de fournir
au pilote une indication d’écart vertical par rapport à la pente de descente nominale.
Le système d’identification par indicatif en code morse en est un moyen de s'assurer du bon fonctionnement
de l'ILS (sauf dans certains cas de panne et lors de sa maintenance).
Un équipement de contrôle et surveillance est présent sur les installations. Il sert à contrôler les émissions en
permanence et permet d’avertir en cas de panne.
Un balisage spécifique pour les ILS catégories III, permet d’assurer le maximum de précision aux signaux
envoyés et éviter que un aéronef ne s’approche trop prêt des antennes qui pourrait déformer le rayonnement
radio électrique des antennes.
La plupart des ILS en France sont couplés avec un DME qui permet de connaître la distance à parcourir pour
atteindre le seuil de piste (elle représente la 3e
composante de guidage pour une approche de précision).
2. STATIONStation AUau SOL
sol
2.1.TYPE1 DEType LOCALIZER
de localizer
Le localizer émet dans la bande VHF. La fréquence étant fixe et prise entre 108,10 MHz et 111,95 MHz avec la
première décimale impaire (Ex: 108,10 – 108,15 – 108,30 – 108,35 etc...).


Il existe plusieurs système de localiser ayant de 13 à 41 antennes de type « log périodique » directrices ou
« type quad » mise en réseau.
Il y a deux types de localizer :
- Single Antenna ;
- Capture
EffectEffect.
Les antennes des anciens localizer rayonnaient de l’énergie vers l’arrière (lobes de rayonnement secondaires),
ce qui créait un faisceau semblable à celui émis vers l’avant.
Ce rayonnement parasite pouvait être utilisé pour :
- Le guidage lors des départs ;
- Les approches de non-précision appelées approches localizer « back course ».
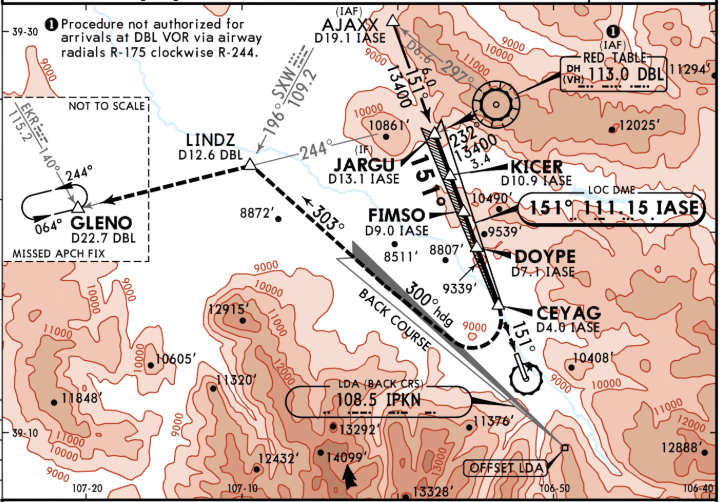 Exemple d'utilisation d'un LOC en back-course pour une remise de gaz à Aspen (KASE)
Exemple d'utilisation d'un LOC en back-course pour une remise de gaz à Aspen (KASE)
Sur les nouveaux systèmes LOC, une émission localizer en back-course est possible grâce à des antennes
spécifiques permettant de reconstituer le faisceau arrière.
Le faisceau arrière est différent du faisceau avant :
- Son gain n’est pas aussi élevé que celui du faisceau avant ;
- Sa précision est plus faible ;
- Aucun glide-slope
disponibledisponible.
Les approches localizer back course sont considérées comme des approches de non
précision au même titre que les approches VOR.
Les approches back courses ne sont disponibles que si ce type d’approche est publié
sur les aéroports.
Les approches back course sont interdites en France
2.2 Type de glise slope
2.2.TYPE DE GLIDE SLOPE
Le glide (slope) utilise des fréquences UHF comprises entre 328.65 et 335.40 MHz. Ces dernières sont
appariées aux fréquences des localizer et sont automatiquement définie en interne dans l’aéronef, de façon
transparente. Le pilote n’a qu’à rentrer la fréquence du localizer pour avoir la fréquence glide active.
Le glide est composé de deux ou trois antennes polarisées horizontalement, disposées verticalement sur un
pylône situé sur l'un des côtés au travers de la zone de toucher des roues.
La réflexion du sol est nécessaire afin de constituer le diagramme de rayonnement du Glide.
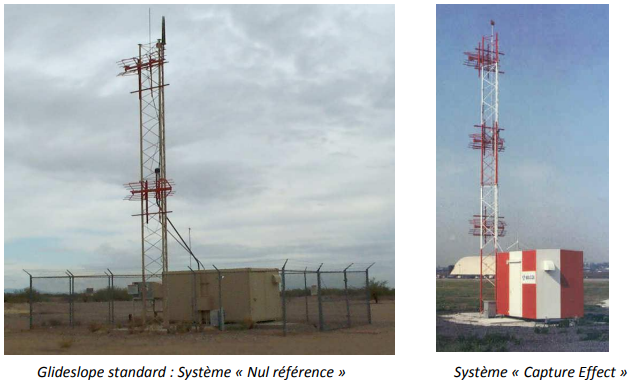
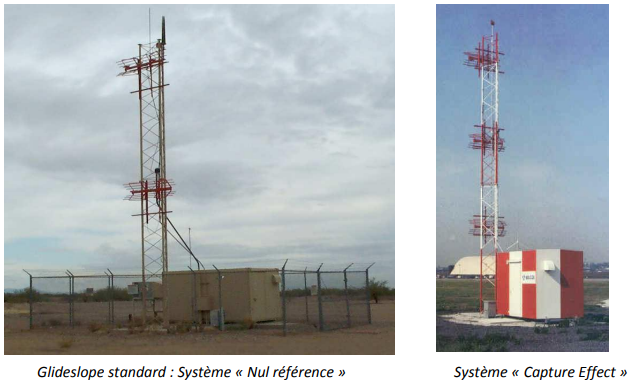
Il existe cinq systèmes homologués qui sont :
- Null-
reference,reference ; - Sideband-reference ;
- Capture-effect ;
- Endfire ;
- Waveguide.
Les trois premiers sont appelés des systèmes à effet d'image (image glide slope system). Ils utilisent la
réflexion du sol pour générer leur diagramme de rayonnement dans l'espace. La stabilité de leur diagramme
dépend beaucoup des conditions météorologiques (exemple : un terrain enneigé ou abondamment mouillé,
va modifier le diagramme de rayonnement).
Les deux derniers sont référencés comme systèmes sans image (non image glide slope system) car ils
n'utilisent pas le sol pour réaliser le diagramme de rayonnement. Ils sont employés lorsque les conditions du
terrain sont telles qu'un système image est inutilisable. Leurs antennes sont radicalement différentes et ne
dépassent pas 1,5 mètre de hauteur.




Si le terrain environnant l'aérodrome est trop dénivelé, on utilisera des variantes permettant de compenser ce
défaut.
Par exemple, il sera préféré:
- Un système « sideband- reference », si le terrain descend en bout de piste ;
- Ce sera plutôt un système « capture-effect », si le terrain remonte en bout de
pistepiste.
2.3 Précision de l'ILS
2.3.PRECISION DE L’ILS
Les chapitres précédents ont mis en lumière les difficultés imposées par le terrain et l'existence de réponses
techniques variées.
L'OACI a donc décidé de classifier ces systèmes ILS en trois catégories distinctes, ceci en fonction des
infrastructures aéroportuaires et de leurs capacités techniques :
SOL |
||||||
Écart max toléré sur la trajectoire |
Écart max toléré sur les modulations |
maximale d'absence d'émission |
||||
LOCALIZER |
CAT I |
0,031 DDM à OM 0,015 DDM à MM 0,015 DDM après |
± 2,5 % |
10 s | ||
CAT II |
0,031 DDM à OM 0,005 DDM à MM 0,005 DDM après |
± 1,5 % |
5 s |
|||
CAT III |
0,031 DDM à OM 0,005 DDM à MM 0,005 DDM après 0,005 à 0,001 DDM après |
± 1,0 % |
2 s |
|||
GLIDE |
CAT I |
0,075 θ |
± 2,5 % |
6 s | ||
CAT II |
0,075 θ |
± 1,5 % |
2 s |
|||
| CAT III | 0,040 θ | ± 1,0 % | 2 s | |||
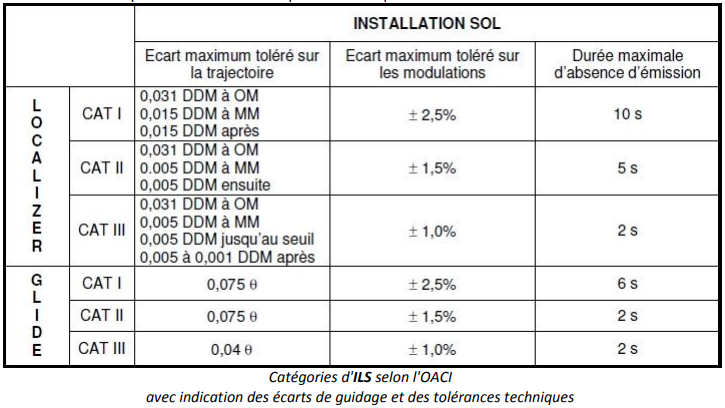
Ces trois catégories d'ILS permettent des opérations d'approche de précision.
Ces approches de précision sont classifiées en trois catégories différentes : CAT I, CAT II et CAT III qui tiennent
compte :
- Des équipements additionnels autres que radio-électriques (marquage, éclairage…) ;
- Des capacités techniques de l'aéronef ;
- De la qualification des équipages ;
- Des minimums spécifiques à chaque plateforme.
| Catégorie ILS | DH | RVR |
CAT I |
200ft ≤ DH |
RVR ≥ 550m |
CAT II |
100ft ≤ DH < 200ft |
RVR ≥ 300m (aéronef CAT A, B et C) RVR ≥ 330m (aéronef CAT D, E) |
CAT IIIa |
50ft ≤ DH < 100ft |
RVR ≥ 200m |
CAT IIIb |
DH < 50ft |
75m ≤ RVR < 200m |
CAT IIIc |
Pas de minimum |
|
75m |
Une approche CAT III ne pourra être menée que sur un ILS de CAT 3
Une approche CAT I pourra être menée sur un ILS de CAT 1 à CatCAT 3
La CAT III est subdivisée en trois sous-catégories : CAT IIIa, CAT IIIb et CAT IIIc.
L'aéronef et l'équipage doivent être certifiés pour la catégorie d'opération envisagée.
En France, toutes les installations radio-électriques sont de CAT 3. Mais toutes les
plateformes ne sont pas certifiées pour des opérations de CAT III.
La RVR (Runway Visual Range) ou portée visuelle de piste est une mesure de la visibilité, effectuée par des
transmissomètres disposés le long de la piste. Ces derniers mesurent la distance maximum jusqu’à laquelle un
pilote, placé sur l’axe de la piste, peut voir les marques ou les feux qui délimitent la piste, ou qui balisent son
axe.
La DH (Decision Height) ou hauteur de décision est la hauteur au-dessus du sol à laquelle la référence visuelle
est indispensable pour la poursuite de l'approche.
2.4 Fonctionnement du localizer
2.4.FONCTIONNEMENT DU LOCALIZER
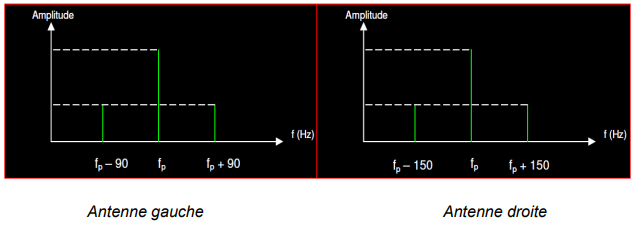
Le système équivaut à deux antennes directives, présentant des faisceaux très étroits, situées de part et
d’autre de la piste et qui émettent, dans le prolongement de son axe, des signaux modulés en amplitude à des
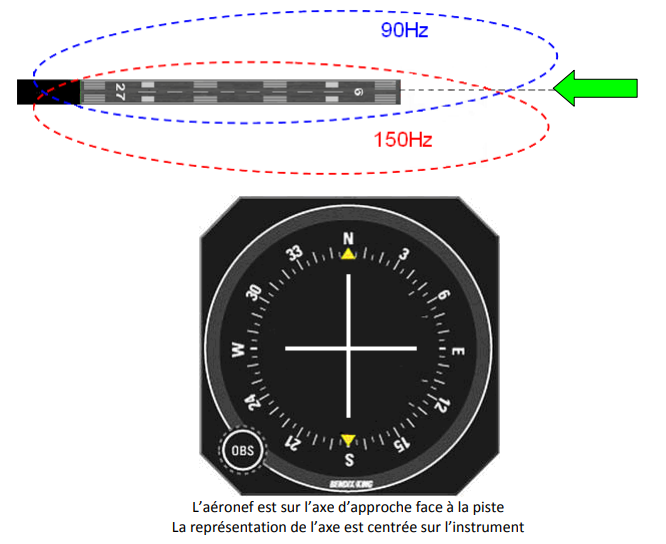
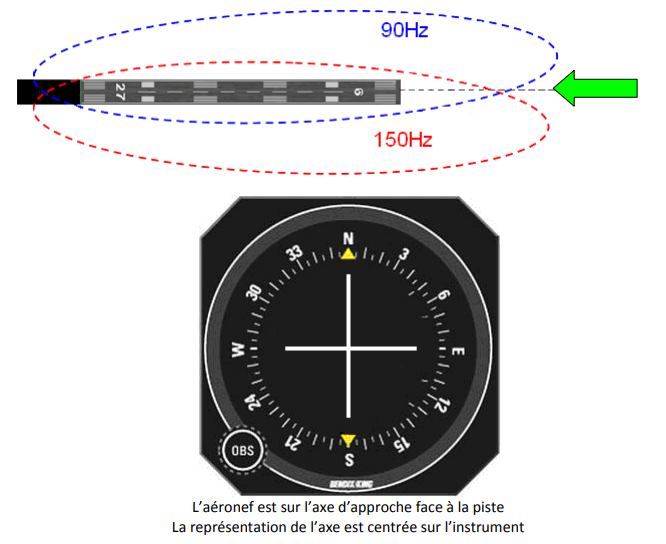
fréquences différentes. L’antenne située sur le coté droit de la piste rayonne une porteuse modulée par un
signal AM de 150 Hz et l’antenne située sur le côté gauche, émet une autre porteuse, modulée par un signal
AM de 90 Hz.
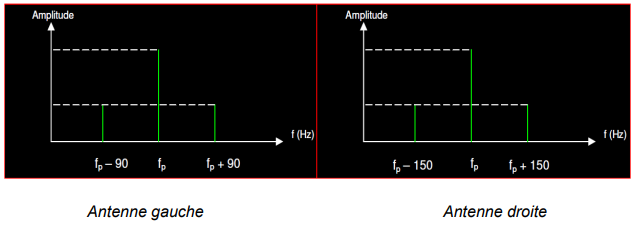
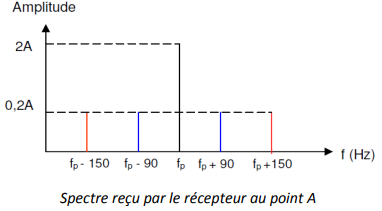
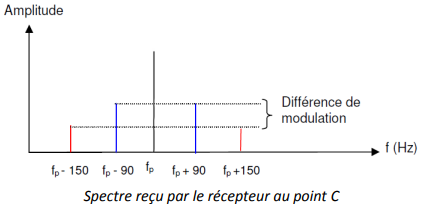
Les fréquences et les amplitudes des deux porteuses sont identiques et chacune est modulée à 40 % par son
signal défini. Le spectre rayonné par chaque antenne présente donc un pic central qui est la porteuse et deux
petites bandes latérales correspondant aux enveloppes des deux modulations.
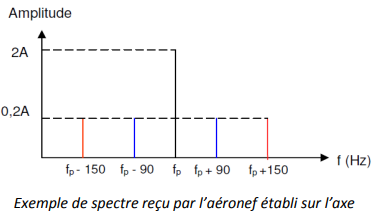
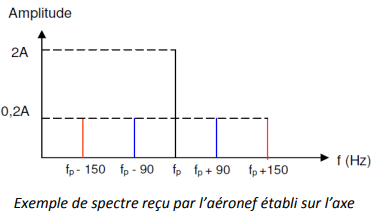
En réalité l’émission est réalisée par un réseau d’antennes qui génère une modulation d’espace. Chaque
antenne émet une partie du 90Hz et du 150Hz afin de générer un faisceau de guidage latéral dans l’espace. Le
récepteur reçoit ainsi de l’énergie des deux antennes et le champ électromagnétique combiné par l’aéronef
possède les deux amplitudes de modulation du 150Hz et du 90Hz.
DDM = différence du taux de modulation (entre les signaux à 90Hz et 150Hz)
TM = taux de modulation (de chaque signal) par rapport à l’amplitude de la porteuse
Nous avons DDM = TM90TM90 –- TM150
TM150
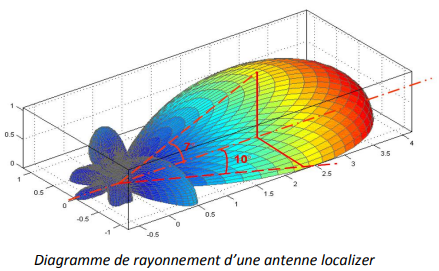
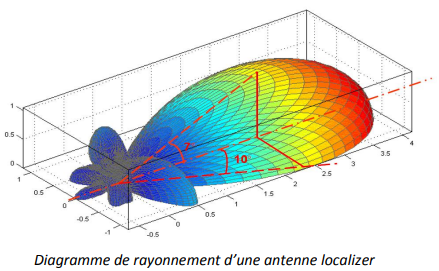
La portée de du faisceau du localizer est d'environ 25NM par rapport à l’antenne émettrice avec un angle d’ouverture
de plus ou moins 10° en azimut (par rapport à l’axe de piste) et jusqu’à 7° en site (par rapport à l’horizontale).
2.5.FONCTIONNEMENT5 DUFonctionnement GLIDEdu SLOPE
glide slope
Le glideslope fonctionne quasiment sur le même principe mais dans le plan vertical. La bande de fréquence
utilisée est différente (UHF), mais le diagramme de rayonnement est semblable (nous ne détailleront pas les
principes identiques).
Il émet des faisceaux radioélectriques dans le prolongement de l’axe de piste qui assurent une couverture en
azimut de 8° de part et d’autre de l’axe ainsi qu'une couverture en site comprise entre 0,45xθ45 x θ et 1,75xθ75 x θ de (θ
étant l’angle de la pente nominale de descente et varie entre 2 et 6°).
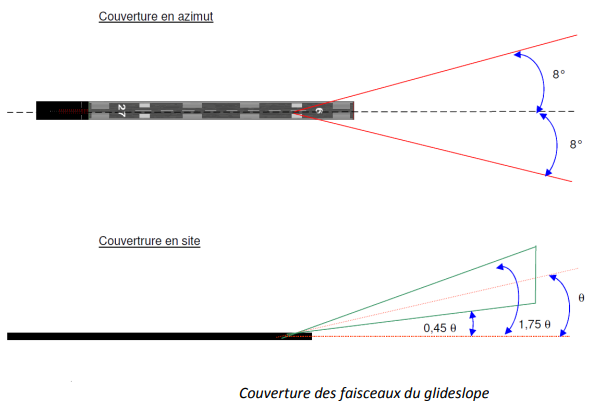
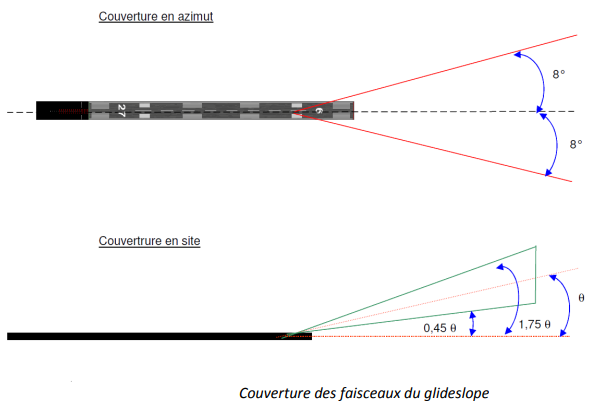
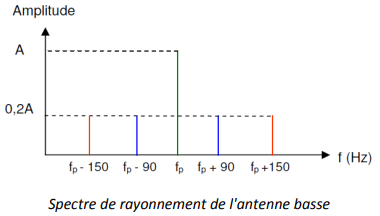
- L’antenne basse se situe à 4,25 m au dessus du sol et rayonne la porteuse de fréquence (
fp)fp) et les
bandes latérales correspondant aux modulations 90 et 150 Hz. Elle est modulée en amplitude.
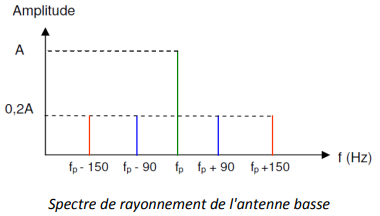
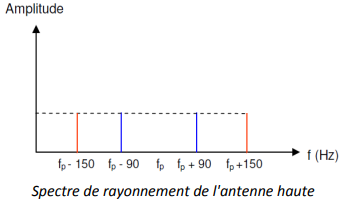
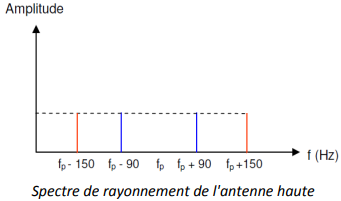
- L’antenne haute est située à 8,5 m du sol et rayonne uniquement les bandes latérales des deux
modulations 90 et 150 Hz. On utilise une modulation d’amplitude avec porteuse supprimée
2.6 Zone de couverture
2.6. ZONE DE COUVERTURE
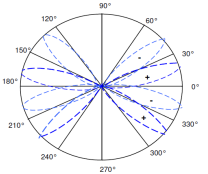
En pratique, les antennes sont moyennement directives, mais précisément espacées les unes des autres et
couplées en réseau afin de créer un diagramme de rayonnement commun, suffisamment étroit.
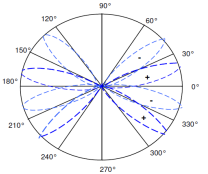
Cependant, même émis avec un diagramme étroit dans l'axe, les signaux du localizer présentés
précédemment ne garantissent pas une sécurité suffisante.
En effet, il est toujours possible de voir un aéronef se diriger vers le seuil de la piste en suivant une direction
différente de celle de son axe. Ceci est du à la présence des lobes secondaires sur les diagrammes de
rayonnement des antennes directives (phénomène physique inévitable).
Ces lobes se situent de part et d’autre de l’axe de piste et sortent largement de l’enveloppe -20° - +20°
souhaitée. Un pilote pourrait donc suivre un faisceau secondaire qui, en apparence, semble tout à fait normal.
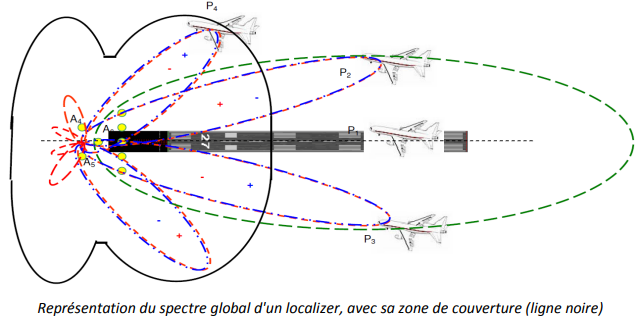
Pour remédier à ce problème avec l’aide d’un ensemble d’antennes directionnelles, une zone de couverture a
été mise en place.
Cette zone couvre les faisceaux incorrects (faisceaux latéraux et arrière) par l’émission d’un signal dont la
fréquence est décalée (si ces signaux étaient à une fréquence identique, ils s’ajouteraient et accentueraient le
phénomène). Cette émission supplémentaire ne fournit pas d'indication de guidage, mais uniquement une
information du type « tout à gauche » ou « tout à droite ».
Le signal principal du localizer s’appelle le signal directionnel et le signal secondaire est le signal de
couverture.
L’émetteur de guidage utilise une fréquence inférieure de 4,75 kHz à la fréquence nominale du
canal (fréquence centrale) et l’émetteur de couverture une fréquence de 4,75 kHz encore en dessous.
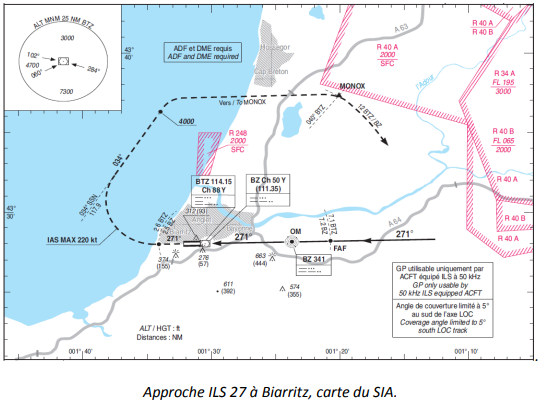
3. REPRESENTATIONReprésentation SURsur LESles CARTES
cartes
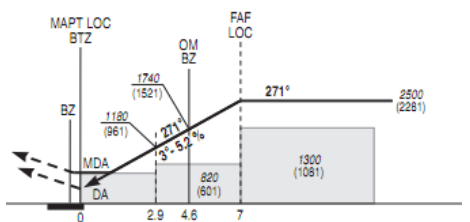
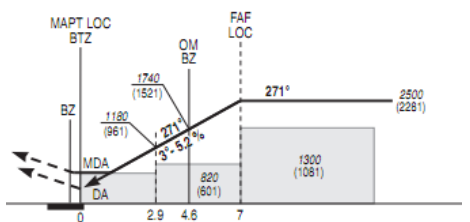
Les ILS sont graphiquement représentés par un symbole spécifique sur les cartes Jeppesen :
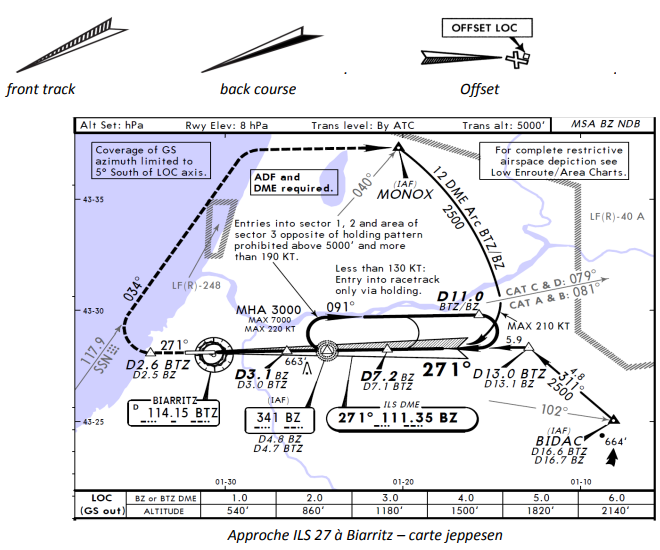
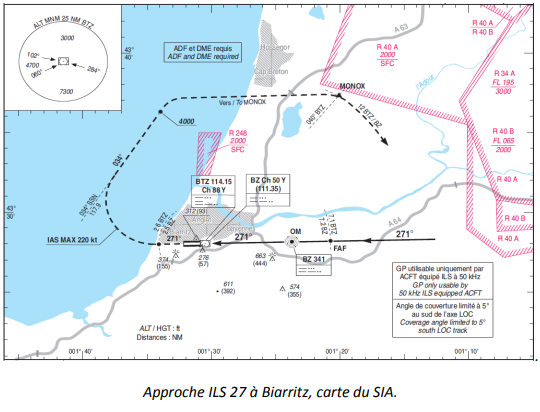
Cependant sur les cartes d’approche du SIA, les ILS ne sont pas représentés avec un signe particulier.
Seul le cartouche de l’approche fait foi en donnant la fréquence, l’identification morse.
L’approche ILS est représenté par la trajectoire rectiligne de l’aéronef.
4. FONCTIONNEMENTFonctionnement DEde LAla DETECTIONdétection
4.1 Principe du récepteur
4.1.PRINCIPE
Le principe pour la réception est extrêmement simple. Il s'agit de comparer les amplitudes de deux signaux de
fréquences différentes. Pour cela, après détection, les signaux sont appliqués à des filtres passe bande de 90
Hz et 150 Hz qui vont en effectuer la séparation. Une fois redressées les tensions résultantes sont envoyées à
l'afficheur.
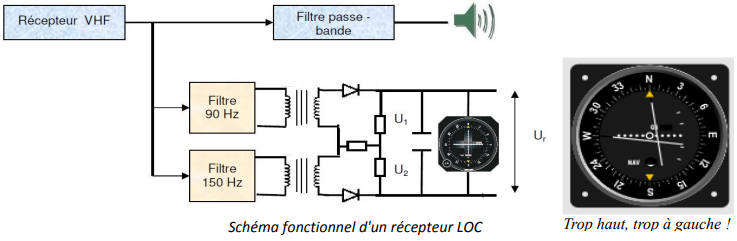
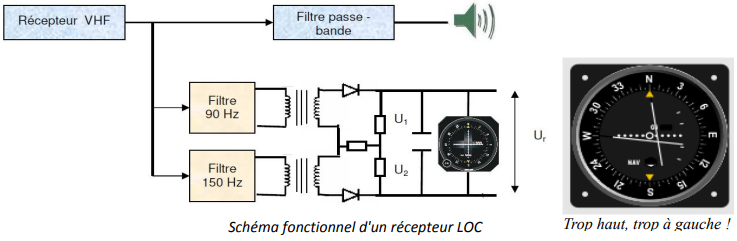
Le pilote n’a plus qu’à regarder la position des aiguilles sur l’instrument pour voir sa position par rapport à
l’axe d’approche idéal représenté par le centre de l’instrument (voir instrument ci-dessus).
4.2 Localisation avec le localiser
4.2.LOCALISATION1 AVECSur LEl'axe LOCALISERde piste
4.2.1.
Le récepteur reçoit autant d'énergie des deux antennes à cause de la symétrie. L’amplitude de modulation du
150Hz est égale à l’amplitude du 90Hz.
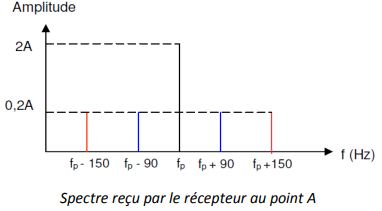
Nous avons DDM = TM90TM90 –- TM150TM150 = 0 µA
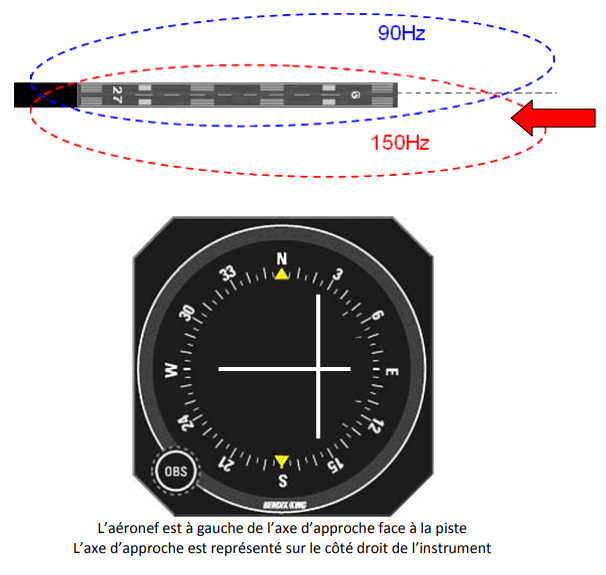
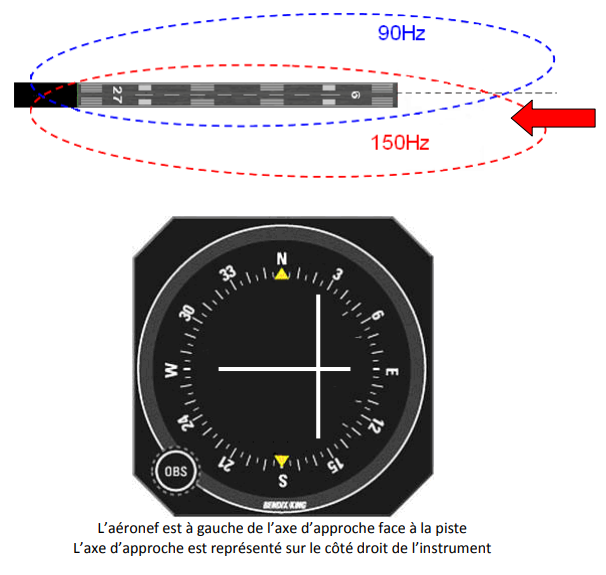
4.2.2.2 SURSur LAla GAUCHEgauche DEde LAla PISTE
piste
L’énergie reçue du rayonnement du 150Hz est plus grande que celle reçue du rayonnement du 90Hz.
L’amplitude de modulation du 150 Hz est supérieure à l’amplitude de modulation du 90 Hz.
La DDM n'étant pas nulle, une indication de déviation vers la gauche est alors transmise à l'afficheur.
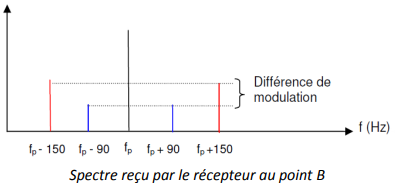
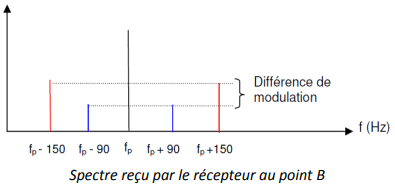
Nous avons DDM = TM90TM90 –- TM150TM150 < 0 µA
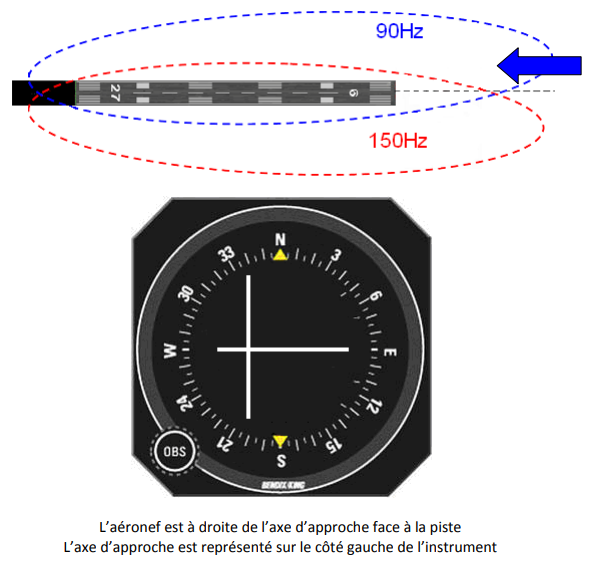
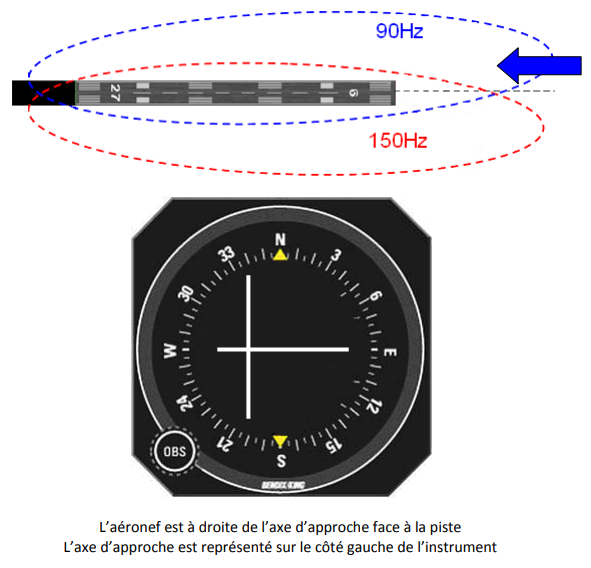
4.2.3.3 SURSur LAla DROITEdroite DEde LAla PISTE
piste
L’énergie reçue du rayonnement du 150Hz est plus petite que celle reçue du rayonnement du 90Hz.
L’amplitude de modulation du 150 Hz est inférieure à l’amplitude de modulation du 90 Hz.
La DDM n'étant pas nulle, une indication de déviation vers la droite est alors transmise à l'afficheur.
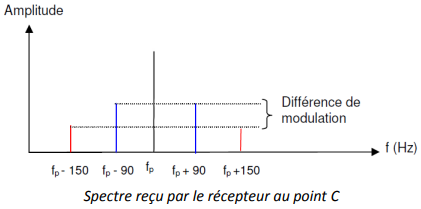
Nous avons DDM = TM90TM90 –- TM150TM150 > 0 µA
4.3 Localisation avec le glide slope
4.3.LOCALISATION AVEC LE GLIDE SLOPE
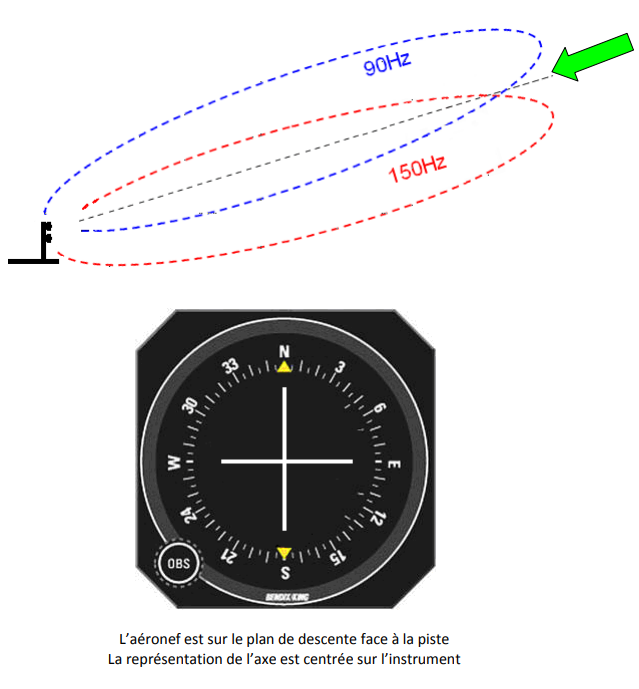
La même réflexion est à apporter pour le plan de descente. Nous ne rappellerons pas les calculs qui suivent le
même principe. Nous ne présenterons que les images.
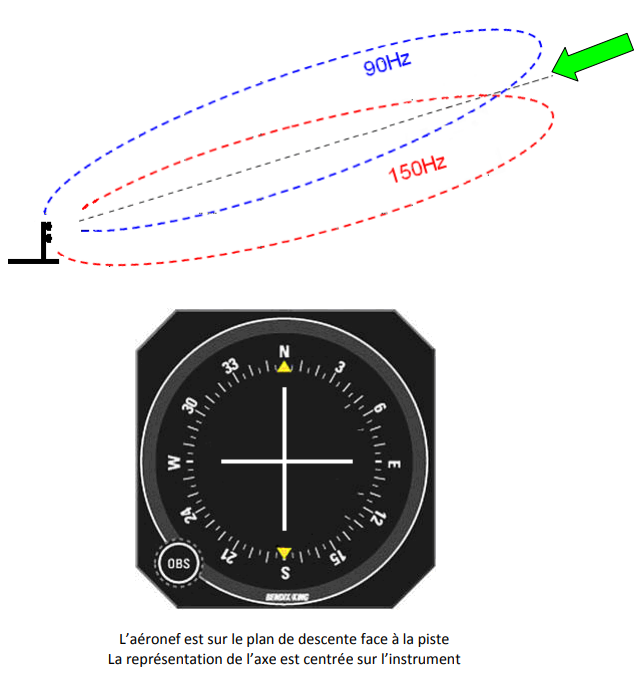
4.3.1.1 SURSur L’AXEl'axe DEde DESCENTEdescente
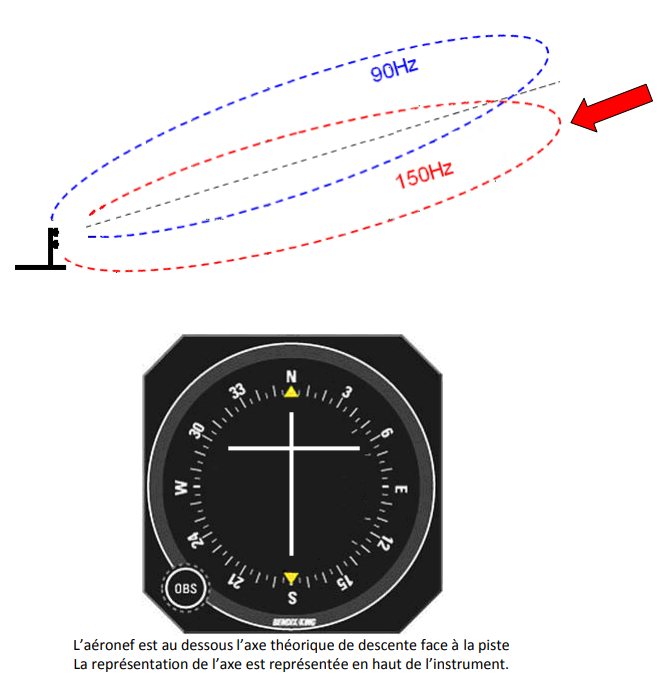
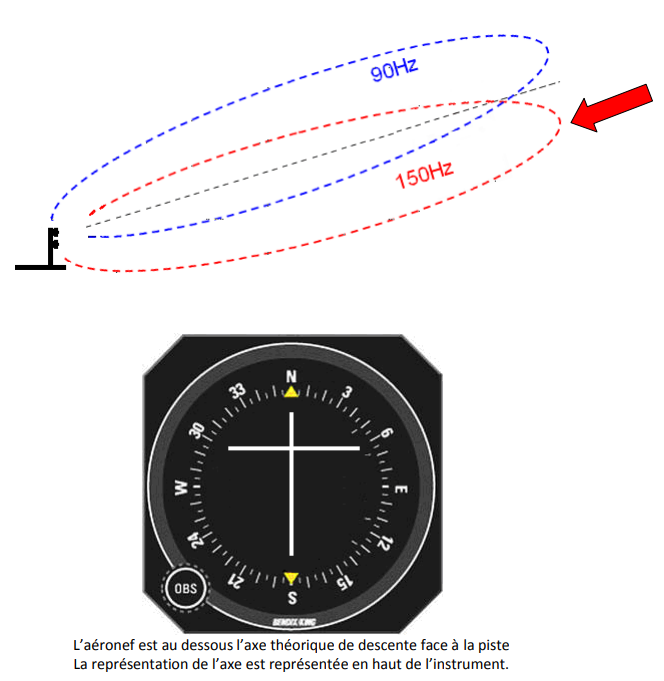
4.3.2 En dessous de l'axe de descente
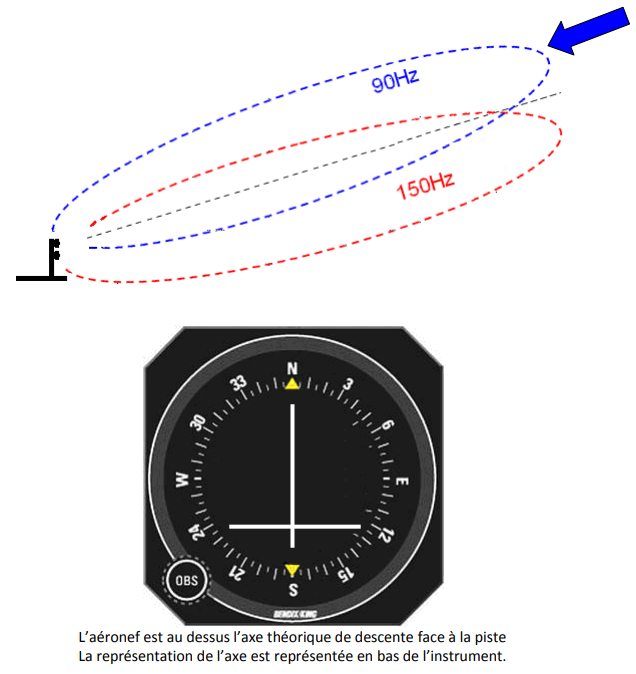
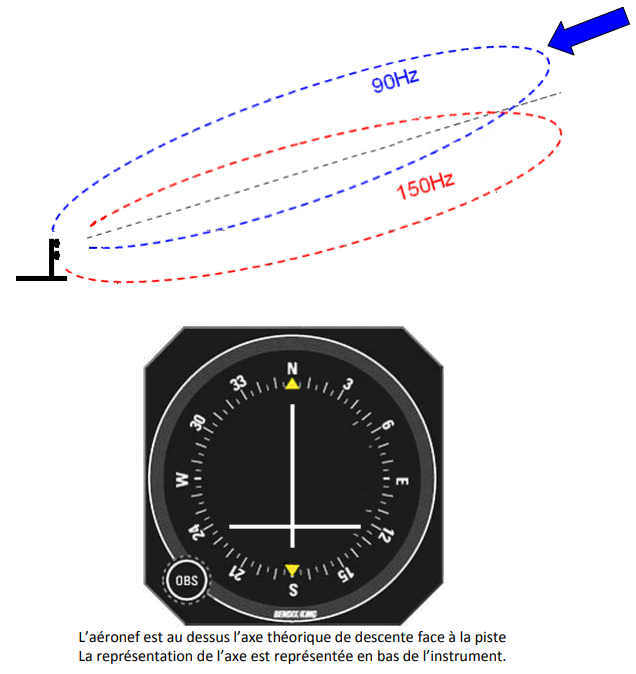
4.3.3 Au dessus de l'axe de descente
4.3.2. EN DESSOUS DE L’AXE DE DESCENTE
4.3.3. AU DESSUS DE L’AXE DE DESCENTE