
Approches RNP
1. Classification des approches
Historiquement, l’OACI classait les approches en deux catégories : approches de précision lorsqu’un guidage latéral et vertical étaient fournis (ILS, PAR, MLS) et non précision lorsque seulement un guidage latéral était fourni (VOR, LOC, NDB). Cependant, avec l’arrivée des approches GPS (maintenant appelées RNP), cette catégorisation n’était plus suffisante. En effet, cette nouvelle technologie permet à la fois des approches de précision et de non-précision.
Une nouvelle classification a donc vu le jour :
- Type A : approche avec une DH >= 250ft ;
- Type B : approche avec une DH < 250ft.
Cependant, cette classification ne permet pas d’indiquer le type de guidage réalisé (latéral ou latéral et vertical).
Dans cette fiche, nous allons nous attarder sur les différents types d’approche RNP qui existent, quelles sont les différences fondamentales dans la technologie utilisée, et comment en tant que pilote nous devons interpréter ces informations.
Voici les différents types d’approche que nous allons étudier :
2. Différence entre un écart angulaire et linéaire
Avant de détailler chaque type, il est nécessaire d’expliquer la différence entre un écart angulaire et un écart linéaire.
Imaginons pour l’instant uniquement un guidage latéral, le principe est le même que pour un guidage vertical.
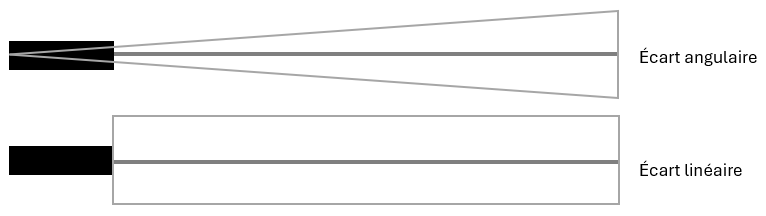
Dans le cas de l’écart angulaire, plus on s’approche de la piste, plus la précision de l’indication de l’écart est forte. Dans l’écart linéaire, peu importe la distance à la piste, le même écart sera indiqué de la même façon tout au long de l’approche.
Le même principe s'applique pour un guidage vertical.
3. Différentes approches
3.1 LNAV
C’est le type d’approche RNP le plus simple qui existe. La base de données de navigation de notre avion connait les coordonnées géographiques du seuil de piste, les coordonnées géographiques du FAF, et est ainsi capable de tracer notre segment d’approche finale. Ensuite, comme lors de son utilisation normale en croisière, le système est capable de calculer notre déviation latérale, et nous indiquera de manière linéaire si nous sommes à gauche ou à droite de l’axe d’approche finale, et une quantification de cet écart.
Exemple : 0.2 R, signifiant 0.2 nautiques à droite de l’axe d’approche finale.
3.2 LNAV/VNAV (également appelée Baro-VNAV)
Un peu plus complexe, cette approche fournit un guidage latéral et vertical. Le guidage latéral est similaire à celui de l’approche LNAV simple.
Le guidage vertical quant à lui est fourni en partie grâce à l’altimètre de l’avion. Cette fois, une altitude au FAF est codée dans la base de données de navigation de l’avion. Le système est alors capable de calculer un plan de descente entre notre FAF et notre seuil de piste, et en plus d’indiquer la déviation latérale, indique aussi la déviation verticale.
Deux problèmes se posent alors :
- En cas de mauvais calage altimétrique, ou de défaillance de l’altimètre, le plan calculé en finale ne sera pas le bon ;
- Par temps froid, le plan en finale sera inférieur à celui pris en compte sur les cartes, basé sur les conditions ISA. Il est alors nécessaire de corriger l’altitude d’interception du plan, ainsi que la DA.
L’écart latéral et vertical est indiqué de manière linéaire, rendant ces approches relativement peu précises.
3.3 LP/LPV
La signification de ces acronymes est importante, elle explique en partie la différence avec les approches évoquées précédemment :
- LP = Localizer Performance ;
- LPV = Localizer Performance with Vertical guidance.
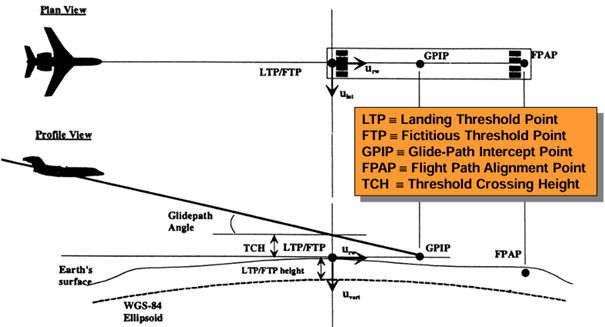
Ces approches fournissent un écart angulaire au pilote. Afin de calculer cet écart, l’ordinateur a besoin d’informations complémentaires. Celles-ci sont codées dans le FASDB (Final Approach Segment Data Block). En voici un exemple, disponible dans les cartes du SIA :
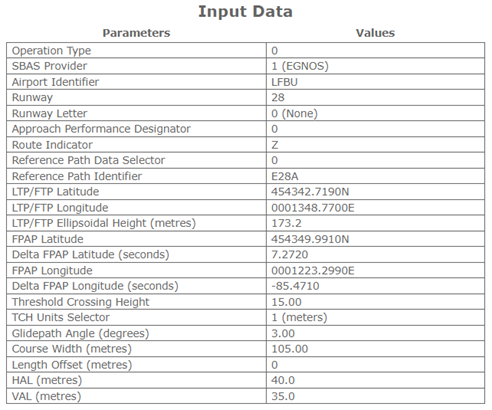
Le FAS DB définit plusieurs points clés :
- Le LTP : Landing Threshold Point, point placé sur le seuil de piste, fictif ou réel ;
- Le FPAP : Flight Path Alignment Point, point placé à l’endroit cible du plan latéral, là où serait placé le LOC sur une approche ILS.
Enfin, pour fonctionner correctement, la précision des signaux GPS doit être augmentée : c’est ce que l’on appelle le SBAS (Satellite Based Augmentation System).
Tout d’abord, pour le SBAS, il est nécessaire de disposer d’une constellation de satellites géostationnaires. En Europe, le nom de cette constellation est EGNOS (European Geostationary Navigation Overlay Service).
Ensuite, le principe est relativement simple : on positionne des antennes sur une étendue assez vaste, chaque antenne connait précisément sa position et est capable de recevoir les signaux satellites. En comparant l’écart entre leur position et la position calculée à l’aide des satellites, chaque antenne est capable d’envoyer un signal de correction aux satellites géostationnaires afin d’augmenter la précision des signaux envoyés aux avions.
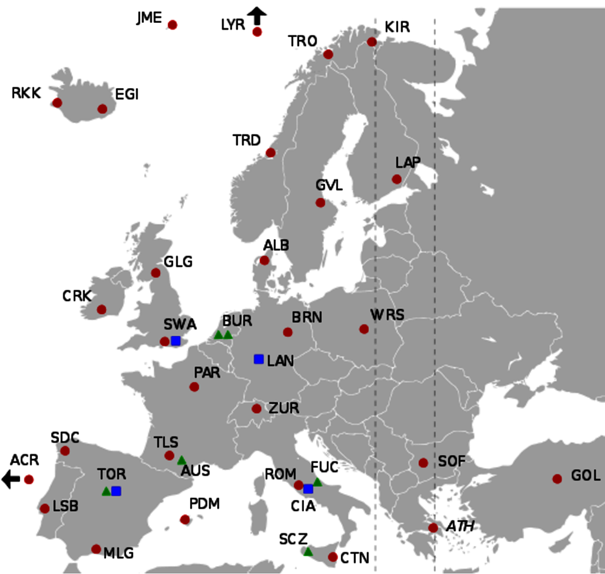 Carte des antennes au sol permettant l’augmentation des signaux GPS.
Carte des antennes au sol permettant l’augmentation des signaux GPS.
Ce système d’augmentation est appelé WAAS (Wide Area Augmentation System) aux Etats-Unis, et n’utilise bien entendu pas la constellation EGNOS.
Pour conclure, à l’aide d’un SBAS, d’un FAS DB et des équipements de bord, notre avion est capable d’indiquer précisément l’écart entre sa position actuelle et la position souhaitée, uniquement sur le plan latéral (approche LP), ou latéral et vertical (LPV).
3.4 GLS
L’approche GLS peut s’apparenter à un mélange entre une approche ILS et une approche LPV. La précision obtenue est similaire, si ce n’est plus grande que pour une ILS, et la technologie utilisée est quasiment identique à une approche LPV.
A la différence d’une approche LPV, le FAS DB n’est pas stocké dans la base de données de l’avion, mais il est transmis directement par une antenne localisée sur l’aéroport. Cette antenne agit plus ou moins comme une antenne utilisée pour le SBAS, mais dans ce cas nous l’appelons GBAS (Ground Based Augmentation System). Ce système couvre une petite superficie, limitée à un aéroport. Il est appelé LAAS (Local Area Augmentation System) aux Etats-Unis.
L’intérêt du développement de ces approches est important : plutôt que d’avoir un glide et un LOC par QFU, une seule station suffit pour équiper toutes les pistes d’un aéroport. A Paris Charles de Gaulle par exemple, plutôt que d’avoir 8 ensembles LOC/glide à entretenir et à calibrer chaque années (cout : plusieurs centaines de milliers d’euros), avoir une seule station serait suffisant et beaucoup moins onéreux.
Pour l’instant en Europe, seulement certains terrains sont équipés de GLS (EDDF, LEMG,…) et sont pour l’instant limités à de la précision de CAT I.