
Régulation en croisière
A partir du grade ![]() et programme examen du grade
et programme examen du grade ![]() et supérieurs
et supérieurs
1. Introduction
Ce document a pour but d'aider les contrôleurs CTR à traiter leur trafic en accord avec les performances des aéronefs dans leur zone.
Vous devrez être familier avec les notions de vitesse indiquée, vraie ou sol (IAS, TAS, GS)
2. Paramètres en en-route
2.1 Niveau de croisière
Tout aéronef devrait dans la mesure du possible pouvoir faire sa croisière à son RFL (Requested Flight Level). Ce n'est parfois pas possible et dans ce cas, le contrôleur essaye de lui assigner un niveau de croisière le plus proche possible de ce que le pilote a déposé ou un niveau négocié avec ce dernier et en fonction des performances dégradées de l’aéronef.
De plus, un pilote qui dépose le FL340 prend généralement le niveau optimal de croisière. L’aéronef ne pourra peut-être pas monter dans tous les cas au FL360 du fait de sa charge et sa performance. Lors d’une phase de vol en début de croisière, les performances de montée d’un aéronef à un niveau plus élevé sont plus limitées qu’en fin de croisière (l’avion est plus léger du fait de la consommation en carburant).
2.2 Vitesse
La vitesse est un paramètre très important en contrôle en en-route. Un aéronef au-delà du niveau FL280, devrait se réguler en vitesse MACH (la limite peut varier entre le niveau FL245 et FL325 en fonction des conditions météorologiques).
Il faut savoir que lorsqu’un aéronef monte à vitesse indiquée constante (IAS) en nœuds (KT), à partir d’une certaine altitude il atteint sa vitesse air (TAS) maximum.
Au dessus de cette altitude, l’aéronef en montant maintiendra une TAS constante et sa vitesse indiquée chutera en fonction des performances de l’aéronef. Dans cette phase, le contrôleur gère la vitesse des aéronefs sous son contrôle principalement en vitesse MACH (qui est une certaine représentation de la vitesse air).
Si deux aéronefs volent à la même vitesse indiquée, l’aéronef ayant le niveau le plus élevé ira le plus vite.
Si deux aéronefs volent à Mach égal, l’aéronef ayant le niveau le plus bas ira le plus vite.
3. Régulation en-route
3.1 But de la régulation en-route
La régulation en route est la tâche principale du contrôleur en-route. Qu’est-ce que la régulation ?
C’est tout d’abord assurer la sécurité des aéronefs entre eux dans l’espace aérien et ordonner la circulation aérienne afin de constituer des flux de trafics.
La régulation en-route comprend les actions suivantes :
- Créer des flux d’aéronefs pour éviter les congestions des aéroports ;
- Raccourcir les trajectoires afin de gagner en efficacité en contrôle et en temps de vol si l’aéroport de destination le permet ;
- Réguler les vitesses des aéronefs entre eux dans les flux ;
- Sécuriser les dépassements et les croisements.
3.2 Croisement des aéronefs
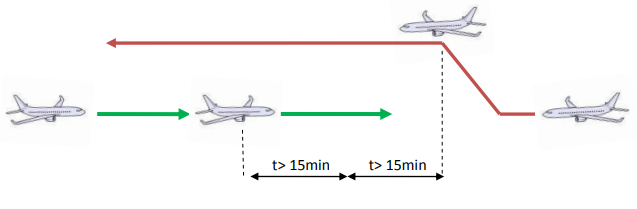
Si les aéronefs doivent se croiser au même niveau de vol avec une séparation latérale inférieure à 15NM en espace contrôlé sous surveillance radar ou 15 minutes en espace contrôlé sans surveillance radar, le contrôleur doit changer le niveau de l’un des deux aéronefs au moins avec une séparation d’altitude de 1000ft minimum dans un espace RVSM (ils doivent se croiser de 2000ft minimum dans un espace non-RVSM).
La séparation minimale en contrôle radar de 5NM latéralement au minimum ou 1000ft au minimum dans les espace RVSM (2000ft dans les espaces non-RVSM) doit être respecté impérativement.
Le changement de niveau des aéronefs doit être dans tous les cas anticipé par le contrôleur au minimum plus de 15 minutes avant le croisement effectif des aéronefs. Il est conseillé d’avoir la résolution du conflit avant une séparation latérale inférieure à 15NM sous contrôle radar.
3.3 Créer une régulation en croisière
Pour effectuer une bonne régulation en croisière, il faut savoir raccourcir les trajectoires en fonction des aéronefs adjacents ou ceux qui prennent les mêmes routes à la même altitude, il faut aussi gérer les vitesses des aéronefs pour éviter un resserrement des séparations.
Le but de la régulation est de créer un flux d’aéronef qui se suit tout en maintenant une distance stable.

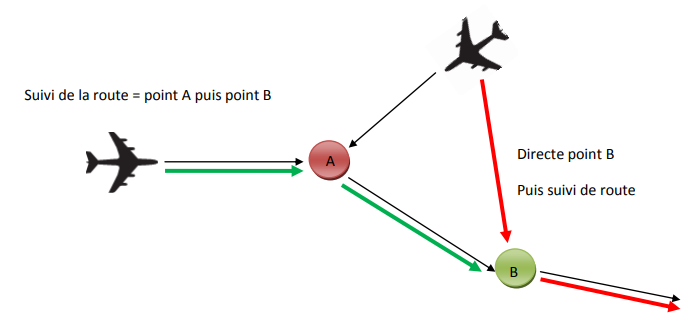
Suivant notre exemple ci-dessous, les 2 aéronefs ont la même estimée sur le point A au même niveau de vol venant d’une route différente mais, leur route est identique après le point A.
Les actions à mener sont :
- Laisser un aéronef sur la trajectoire publiée - généralement celui qui a la plus longue trajectoire ;
- Donner à l’autre aéronef une clairance directe sur un point plus éloigné afin de raccourcir la trajectoire et ainsi faire passer celui qui a la plus petite trajectoire estimée en premier ;
- Réguler ensuite les vitesses en fonction de l’espace ainsi créé entre les 2 aéronefs afin de maintenir une distance la plus constante possible sur la route.
Les difficultés et les paramètres importants que le contrôleur doit prendre en compte sont :
- Différence de vitesse de croisières ;
- Choix du point optimal de la directe (charge, capacité RNAV, …) ;
- Présence d’autres aéronefs qui impacte directement la régulation à faire.

3.4 Maintenir un flux d'aéronef sur une même route
En tant que contrôleur, vous devez vérifier la position des aéronefs qui volent au même niveau et sur les mêmes routes.
Le contrôleur doit en permanence surveiller les vitesses de chaque aéronef pour s’assurer que la régulation se maintienne. Il doit accélérer ou ralentir les aéronefs de telle manière à ce que les vitesses soit le plus proche possible.
Le contrôleur peut accélérer le premier aéronef s’il est dans la capacité de le faire et/ou ralentir le second aéronef afin que la vitesse sol (vue par le radar) du second aéronef soit inférieure ou égale à celle du premier.

Pour maintenir une séparation, nous devons agir sur les vitesses et avoir les rapports de vitesse suivant :
V1 ≥ V2 ≥ V3
Généralement, la distance de séparation entre 2 aéronefs consécutifs sera supérieure ou égale à 15NM en croisière pour du contrôle en route sous surveillance radar.
Le contrôleur essayera dans la mesure du possible d’affecter un niveau optimal pour l’aéronef autant que possible (ni trop bas ni trop haut). Il essayera également d’assigner un niveau optimal de régulation afin d’éviter de changer le niveau des aéronefs en permanence. L’optimisation du nombre des clairances permet une meilleure surveillance radar et une meilleure anticipation.
Pour les zones non contrôlées ou contrôlées sans radar, les séparations doivent être supérieures à 15 minutes.
Si vous utilisez cette technique, il est recommandé de ne pas varier les vitesses plus de 0.2 point de Mach pour ne pas pénaliser la croisière des aéronefs. Ceci peut être utilisé pour plus de deux aéronefs si tant est que la distance entre chaque paire d’aéronef est suffisante.
4. Montée ou croisement en croisière
Avant d’arriver au niveau de croisière, tous les aéronefs ont une phase plus ou moins longue de montée.
4.1 Gestion de la montée ou croisement par altération de la trajectoire
Les montées des aéronefs doivent être gérées par le contrôleur sans palier à des niveaux intermédiaire autant que possible.
4.1.1 Gestion par altération de cap
Le contrôleur peut donner un guidage radar au détriment de la trajectoire pour amener un aéronef à son niveau de croisière (montée prioritaire au détriment de la trajectoire pour éviter un autre aéronef en conflit de trajectoire).
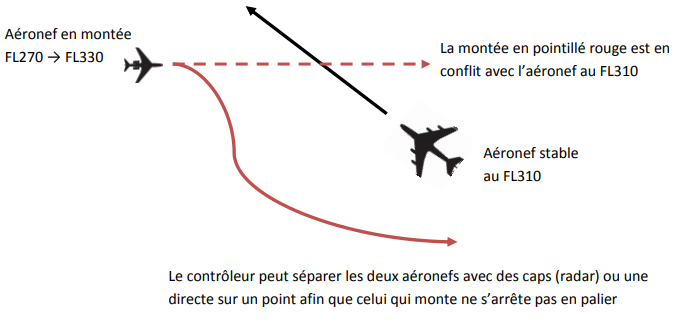
Dans presque tous les cas, l’aéronef qui monte sans palier est gagnant par rapport à une mise en palier à un niveau beaucoup plus bas, même si sa trajectoire est plus longue.
La séparation minimum entre les 2 aéronefs devra toujours être strictement supérieure à 5NM.
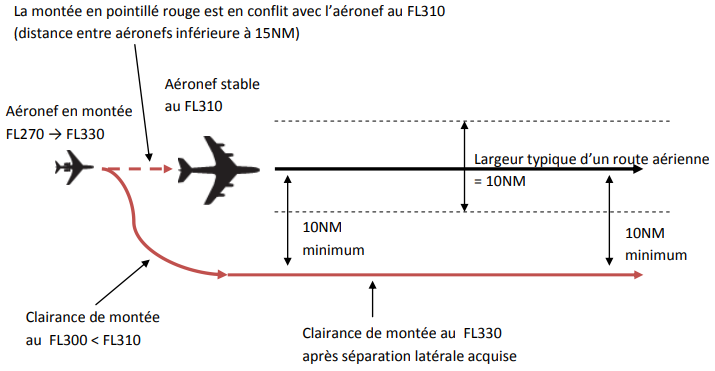
4.1.2 Gestion par route offset
Nous allons étudier la problématique de faire monter un aéronef sur une route ayant un aéronef devant lui et plus haut sur cette même route. Cependant cet aéronef est beaucoup plus lent.
Une méthode possible est l’utilisation de la route parallèle offset.
Une route parallèle offset est une manœuvre qui amène un aéronef à suivre une route aérienne mais en décalé latéralement en maintenant une distance constante avec la route cible afin d’assurer.
Cette méthode a plusieurs avantages :
- Permettre de faire doubler deux aéronefs en suivant la même route au même niveau en assurant une séparation horizontale suffisante ;
- Permettre de faire monter un aéronef plus bas à un niveau plus élevé en assurant une séparation latérale suffisante ;
- Faire garder un suivi de route minimum de l’aéronef qui fait la manœuvre.
Cette méthode a quelques inconvénients :
- Peu de pilotes sur IVAO comprennent la clairance de route parallèle offset ;
- Un guidage radar est souvent nécessaire pour faire faire la manœuvre aux aéronefs.
Cette méthode est particulièrement efficace pour faire doubler un aéronef par un un aéronef plus rapide au même niveau ou croisant le même niveau.
4.2 Gestion de la montée par le taux de montée parallèle
Lors d’un flux d’aéronefs en montée sur une même trajectoire en-route, un contrôleur en-route peut gérer la séparation en montée parallèle à l’aide de clairance de taux de montée (en ft/min). Cependant il doit faire attention que les 2 aéronefs ne se rapprochent pas si la séparation latérale n’est pas suffisante. Il doit choisir le taux de montée en fonction de la situation.
L’ordre des clairances est de :
- Donner le taux de montée minimum au premier aéronef le plus haut ;
- Donner le taux de montée maximum au second aéronef le plus bas inférieur au taux de montée du premier aéronef ;
- Monitorer en permanence la séparation des 2 aéronefs surtout en fin de montée si le premier arrive à un palier (niveau de croisière ou niveau autorisé).
Le contrôleur peut donner le même taux de montée afin de maintenir la performance optimum. Il faut qu’il sache donner un taux réaliste que peuvent prendre les aéronefs.
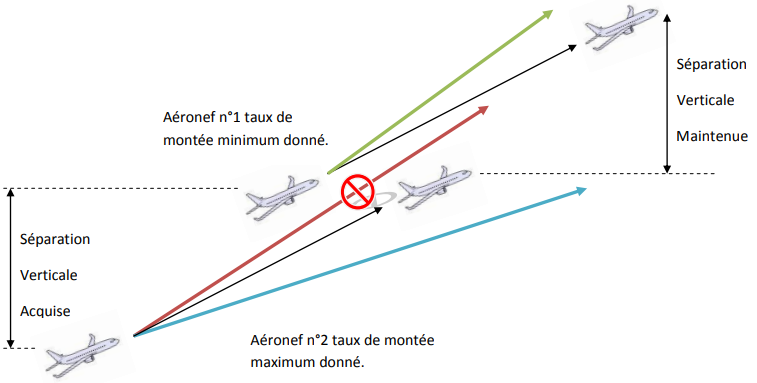
Suivant la figure ci-dessus, le taux donné par le contrôleur est donné en noir.
- En donnant un taux minimum au premier aéronef, ce dernier peut prendre un taux plus élevé (flèche verte). La conséquence est l’augmentation de la séparation verticale ;
- En donnant un taux maximum au deuxième aéronef, ce dernier peut prendre un taux plus faible (flèche bleue). La conséquence est l’augmentation de la séparation verticale ;
- En donnant un taux minimum au deuxième aéronef, ce dernier pourra prendre un taux plus élevé que le minimum du premier aéronef (flèche rouge). La conséquence est la diminution de la séparation verticale et donc le risque d’atteindre la perte de séparation verticale. Clairance à proscrire !
4.3 Performance de montée
Chaque aéronef a ses propres limites en fonction de la performance de poussée de ses moteurs.
De manière générale, un aéronef devra modifier soit la vitesse indiquée ou soit le taux de montée lors de sa phase de montée en croisière.
- Si le pilote veut maintenir la vitesse de son aéronef en montée, il devra baisser son taux de montée en ft/min afin de maintenir un niveau de N1 adéquat dans les limites spécifiées par l’aéronef ;
- Si le pilote veut maintenir le taux de montée à son aéronef en montée, il devra baisser sa vitesse indiquée afin de maintenir un niveau de N1 adéquat dans les limites spécifiées par l’aéronef.
Si le contrôleur demande un fort taux de montée, celui-ci doit s’attendre à ce que le pilote réduise fortement la vitesse indiquée de son aéronef afin de maintenir ce taux de montée.
Attention le pilote ne devra pas trop s’approcher de la vitesse de décrochage en configuration lisse dans les conditions atmosphériques courantes. Il est conseillé de prendre une marge opérationnelle qui protège l’aéronef du décrochage lors d’une apparition intempestive des changements brusques de direction de vent (courant sur IVAO).
Inversement, si le contrôleur demande une forte vitesse indiquée, celui-ci doit s’attendre à ce que le pilote réduise fortement le taux de montée de son aéronef afin de maintenir la vitesse demandée.
La vitesse en montée est entre 220 KT et 250KT jusqu'au FL100 là où ils vont altérer leur montée pour accélérer puis reprendre un taux de montée plus élevé (entre 250 KT et 320 KT).
Les aéronefs montent en vitesse indiquée puis en point de Mach lorsque les deux s'accordent.
4.4 Différences de performances des aéronefs
Tous les aéronefs n'ont pas les mêmes performances en montée :
- Les aéronefs très lourds (spécialement les quadriréacteurs) ont des taux de montée faibles lorsqu'ils partent pour des vols longs courriers ;
- Les business jets biréacteurs très légers de construction récente ont des taux de montée plus importants que les avions de ligne ;
- Les avions bi turbopropulseurs ont des performances moindres que celle des biréacteurs. Cependant, ils peuvent monter avec un fort taux de montée mais en ayant une vitesse faible.
Il faut savoir également les performances de certains aéronefs qui sortent de la norme :
- Le BAE146 ou RJ85 est un quadriréacteur ayant une vitesse faible et un taux de descente/montée faible ;
- Les CITATION 500/501/525/560 sont des biréacteurs mais leurs vitesses caractéristiques sont faibles ;
- Le Piaggo Avanti P180 est un bi turbopropulseur cependant il peut avoir une vitesse ou un niveau de croisière compatible avec les biréacteurs.
5. Descente
Le contrôleur en route doit être sensibilisé à la gestion de la descente des aéronefs.
Les contraintes du réseau IVAO font que les pilotes sont amateurs et non professionnels et le contrôleur doit être le garde fou de la gestion de la descente en dernier recours.
Le contrôleur doit savoir :
- Où sera le point de descente (TOD Top of Descent) approximatif de chaque aéronef ;
- Imposer une descente pour les pilotes qui descendent tardivement ou qui oublient de descendre ;
- Reporter une descente pour les pilotes qui descendent de manière trop anticipée ;
- Donner un taux de descente optimal pour les pilotes qui ne descendent pas assez vite ou trop vite ;
- Préparer une pré-régulation.
Dans le cas ou un pilote vous annonce ne pas pouvoir réduire sa vitesse, n'oubliez pas que cela peut être dû à son altitude, et donc si vous le faites descendre il pourra cette fois ci réduire. Certains aéronefs vont voir leur vitesse indiquée augmenter pendant la descente.
5.1 Calcul d'un top of descent en contrôle
Ce calcul est valable dans le cas d’un aéronef isolé sans à avoir à faire de la régulation avec un aéronef devant lui.
Il y a 2 méthodes :
- Management au taux de descente en ft/min (suite à clairance donnant ce taux) ;
- Management à la pente en degré (ou pourcentage).
5.1.1 Gestion en taux de descente
Voici la représentation d’un trafic sur le radar. Nous avons un plot aéronef associé à son vecteur vitesse en minutes.


La longueur du vecteur vitesse représente la distance que va parcourir l’aéronef s’il garde la même vitesse sol et la même direction.
Ce vecteur vitesse est sensible aux changements de direction du vent (si le vent est fort) ou à l’altitude (perte de vitesse sol) et à la vitesse de l’aéronef
Ce vecteur vitesse est exprimé en minutes. Dans votre radar, vous pouvez le sélectionner à 0, 1, 2, 4 ou 8 minutes. Dans notre exemple nous sélectionnerons 4 minutes pour l’explication (le calcul sera valable pour chacun des valeurs de vecteurs non nulles).
Dans notre calcul notre aéronef est au point A, et le vecteur vitesse de 4 minutes pointe sur le point B. L’aéronef va descendre du point A jusqu’au point B avec un taux de descente constant TD fixé. Pendant sa descente, il passera du Niveau initial FLinitial au niveau final FLfinal.
L’aéronef perdra une différence de niveau de ∆alt = (FLinitial - FLfinal) x 100
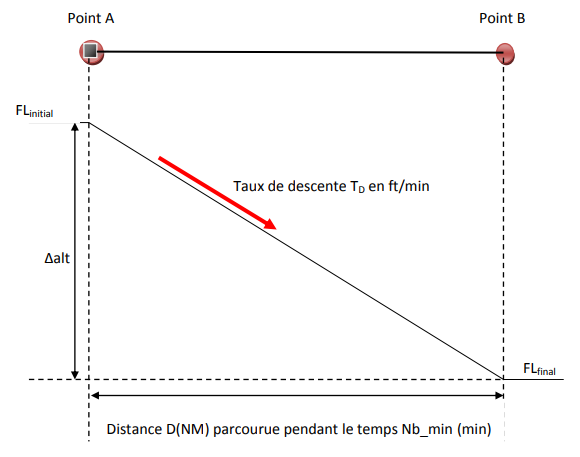
La formule à utiliser dans notre cas est :
VZ (ft/min) = ∆alt (ft) / Nbmin (min)
ou
FLfinal = FLinitial – [ VZ x Nbmin ]/100
Cas du calcul du taux de descente avec niveaux imposés :
L’avion est au niveau de vol FL330 et nous souhaitons qu’il ait atteint le niveau FL200 au bout de 4 minutes. Quel sera le taux de descente théorique ?
Nbmin = 4 min (le vecteur vitesse fait 4 minutes)
FLinitial = FL330 ; FLfinal = FL200
∆alt = (330– 200) x 100 = 13000 ft
VZ = ∆alt / Nbmin = 13000 / 4 = 3250 ft/min
Le contrôleur doit donner au moins un taux de descente de 3250ft/min pour satisfaire l’arrivée au FL200 sur le point B.
Dans ce cas, le contrôleur arrondira le taux de descente à une valeur supérieure par exemple à 3300ft/min (voir 3500ft/min s’il veut plus de marge). Sachant que si le contrôleur donne un taux supérieur à la valeur théorique, l’aéronef arrivera au niveau voulu avant le point cible. De même, s’il donne un taux de descente inférieur, l’aéronef arrivera au niveau voulu après le point cible.
Cas du calcul du Niveau d’arrivée estimé avec un taux de descente imposé :
L’avion est au niveau de vol FL280 et nous souhaitons lui donner un taux de descente de 2000ft/min. Quel sera le niveau obtenu dans 4 minutes ?
Nbmin = 4 min (le vecteur vitesse fait 4 minutes)
VZ = 2000 ft/min
FLinitial = FL280
FLfinal = FLinitial – [ VZ x Nbmin ] / 100 = 280 – (2000 x 4) / 100 = 280 – (8000/100) = 280 – 80 = 200
L’aéronef au bout de 4 minutes atteindra le FL200 s’il maintient une descente de 2000ft/min.
Il faut savoir la limitation de ce calcul qui est un calcul approché. Car en réalité l’aéronef va perdre de la vitesse sol en descendant et donc, le vecteur vitesse se raccourcir légèrement et la pente ne sera pas constante.
A haute altitude, au début de la descente, dû faite de la haute vitesse l’angle de la pente sera plus faible qu’à basse altitude, où la vitesse sol est plus faible et donc la pente de descente plus importante.
5.1.2 Gestion en pente
Nous gardons le même graphique que précédemment mais la formule change. Nous calculons une distance entre le point estimé de descente que l’on recherche et le point cible avec un niveau final recherché et une pente donnée.
La formule à utiliser dans notre cas est :
D (NM) = ∆FL (x 100ft) / Pente (°)
et
L’aéronef perdra une différence de niveau de ∆FL = FLinitial - FLfinal
Cas du calcul de distance du TOD avant le point cible :
Un aéronef airbus souhaitant un niveau final au FL120 en respectant une pente à 3° ayant un niveau de croisière au FL260. A quelle distance du point où il doit obtenir le niveau final doit-il descendre ?
FLinitial = FL260 ; FLfinal = FL120
Pente = 3°
∆FL = 260– 120= 140 ft
D (NM) = ∆FL / Pente = 140 / 3 = 46.7 NM
Le point TOD (Top Of Descent) estimé de l’aéronef se situe à 46.7NM en amont du point cible dans les conditions spécifiées.
Ce calcul est approché et il ne tient pas compte de la variation de la vitesse sol et des éventuels paliers de stabilisation de la vitesse de l’aéronef, ainsi que les variations de vents durant la descente de l’aéronef.
Cependant, il constitue une bonne base de départ pour l’estimation des descentes.
5.2 Gestion des descentes multi-aéronefs
5.2.1 Gestion de descente par palier
Cette gestion est généralement la plus sécuritaire et permet généralement de s’affranchir de certaines erreurs de pilotage et de prise de mauvais taux de descentes des pilotes (trop élevés ou trop faible).
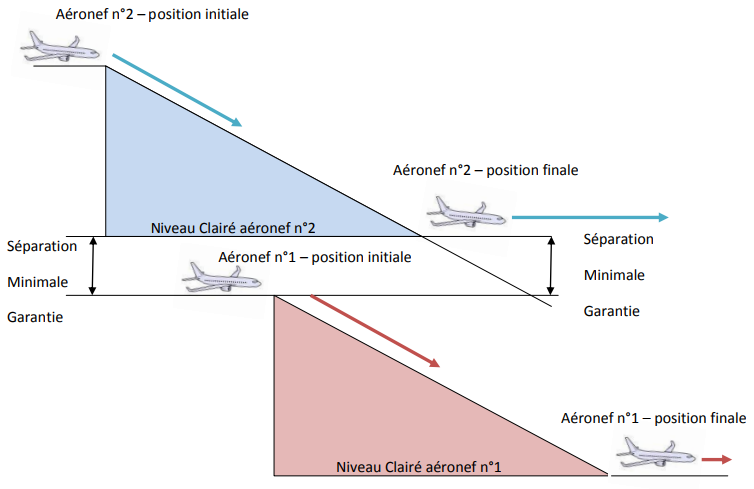
Le but est d’assigner la descente à un aéronef à un niveau sécurisé et libéré par l’aéronef précédent tout en respectant la séparation verticale minimale.
Notre exemple montre un aéronef n°2 plus haut et relativement proche de l’aéronef précédent en séparation latérale. La gestion d’une descente conjointe sécurisée peut se passer comme suit :
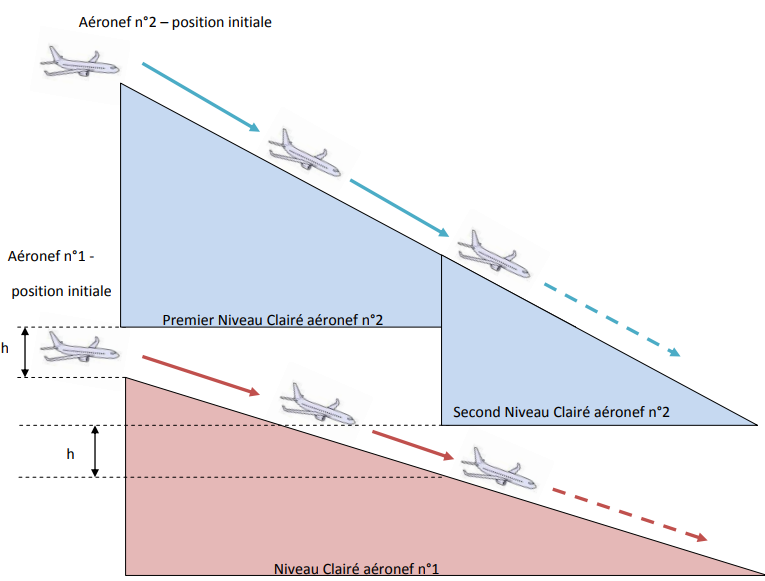
Ensuite pour optimiser la descente sans palier, il est usuel de donner des clairances complémentaire en fonction de la descente du premier aéronef.
L’aéronef n°1 plus bas a un taux de descente inférieur que l’aéronef du dessus. Cependant, la clairance donnée à l’aéronef n°2 garanti la séparation minimum h entre les 2 aéronefs, quel que soit la descente de l’aéronef n°1.
Quand l’aéronef n°2 arrive proche de son premier niveau clairé, le contrôleur donne une seconde clairance de descente à un niveau plus bas tout en garantissant la séparation minimum h entre les 2 aéronefs.
Cette méthode est la plus ordinaire et la plus efficace pour assurer la sécurité en contrôle. Elle est recommandée pour une utilisation courante sur IVAO.
Notez que le contrôleur doit donner la clairance de descente à l’aéronef n°2 en anticipation pour éviter le palier à l’aéronef atteignant le premier niveau clairé.
Le contrôleur donne usuellement la clairance 1000ft ou 2000ft avant le premier niveau autorisé (il peut faire plus si besoin).
La séparation entre les 2 aéronefs notée H est définie :
H = [Niveau Clairé de l’aéronef le plus élevé] – [Niveau courant de l’appareil]
La séparation minimale verticale entre 2 aéronefs est de :
- H = 1000ft dans les espaces RVSM et pour les Niveaux <FL290
- H = 2000ft dans les espaces non-RVSM
5.2.2 Gestion de descente par taux de descente parallèles
L’autre possibilité de gestion des descentes des aéronefs sans changer leur route est de les faire descendre de manière parallèle en gérant le taux de descente des 2 aéronefs par des clairances en maintenant l’écart des aéronefs.
Cependant il doit faire attention que les 2 aéronefs ne se rapprochent pas si la séparation latérale n’est pas suffisante. Il doit choisir le taux de montée en fonction de la situation. Le but est d’assigner le même taux de descente entre les 2 aéronefs afin qu’ils gardent approximativement la même séparation entre eux.
L’ordre des clairances est de :
- Donner le taux de descente maximum au premier aéronef le plus bas ;
- Donner le taux de descente minimum au second aéronef le plus haut inférieur au taux de descente du premier aéronef ;
- Surveiller en permanence la séparation des 2 aéronefs surtout en fin de descente si le premier arrive à un palier (niveau clairé ou niveau publié).
Le contrôleur peut donner le même taux ou un taux différent de descente afin de maintenir la performance optimum. Il faut qu’il sache donner un taux réaliste que peuvent prendre chaque aéronef et un taux pour assurer une meilleure pré-régulation pour le contrôleur approche.
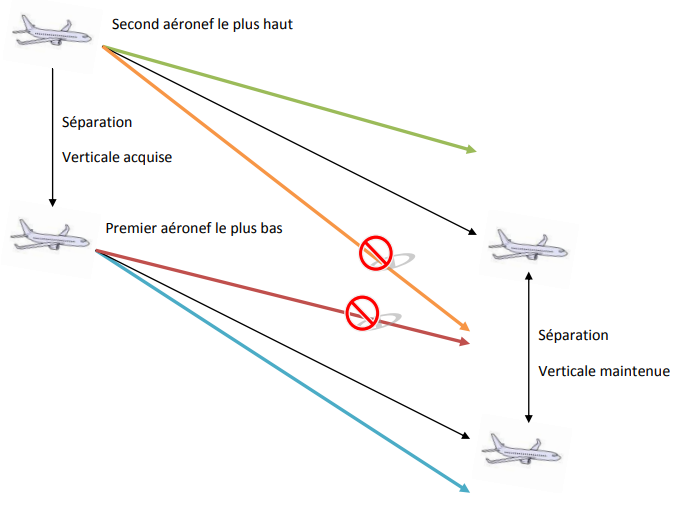
Suivant la figure ci-dessus, le taux donné par le contrôleur est donné en noir.
- En donnant un taux minimum au premier aéronef, ce dernier peut prendre un taux plus élevé (flèche bleue). La conséquence est l’augmentation de la séparation verticale ;
- En donnant un taux maximum au deuxième aéronef, ce dernier peut prendre un taux plus faible (flèche verte). La conséquence est l’augmentation de la séparation verticale ;
- En donnant un taux minimum à respecter au deuxième aéronef, ce dernier pourra prendre un taux plus élevé que celui du premier aéronef (flèche orange). La conséquence est la diminution de la séparation verticale et donc le risque d’atteindre la perte de séparation verticale. Clairance à proscrire !
- En donnant un taux maximum à respecter au deuxième aéronef, ce dernier pourra prendre un taux moins élevé que celui du deuxième aéronef (flèche rouge). La conséquence est la diminution de la séparation verticale et donc le risque d’atteindre la perte de séparation verticale. Clairance à proscrire !
Lors de descente parallèles, le contrôleur doit être conscient des taux de descentes de ces divers appareils (estimation, clairance, connaissance appareils, …). Il doit en permanence surveiller l’évolution de la séparation entre les aéronefs.
Il donne des nouvelles clairances de descentes (niveaux, taux de descentes) afin de maîtriser au plus vite une réduction de la séparation verticale surtout quand la séparation horizontale n’est pas garantie.
5.2.3 Gestion de descente par route offset
De même que la problématique de la montée, une descente de deux appareils sur une même route avec croisement de niveau ou descente parallèle peut se gérer à l’aide d’une séparation latérale en utilisant la route parallèle offset.
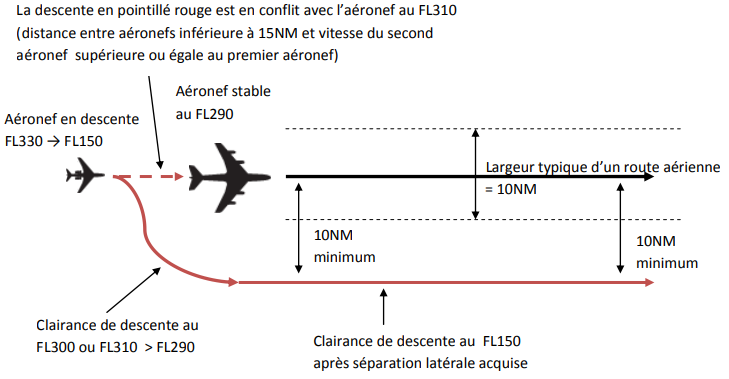
Cette méthode est particulièrement efficace pour faire doubler un aéronef par un aéronef plus rapide croisant le même niveau.