
Régulation en croisière
A partir du grade ![]() et programme examen du grade
et programme examen du grade ![]() et supérieurs
et supérieurs
Introduction
Ce document a pour but d'aider les contrôleurs CTR à traiter leur trafic en accord avec les performances des aéronefs dans leur zone.
Vous devrez être familier avec les notions de vitesse indiquée, vraie ou sol (IAS, TAS, GS)
Paramètres en en-route
Niveau de croisière
Tout aéronef devrait dans la mesure du possible pouvoir faire sa croisière à son RFL (Requested Flight Level). Ce n'est parfois pas possible et dans ce cas, le contrôleur essaye de lui assigner un niveau de croisière le plus proche possible de ce que le pilote a déposé ou un niveau négocié avec ce dernier et en fonction des performances dégradées de l’aéronef.
De plus, un pilote qui dépose le FL340 prend généralement le niveau optimal de croisière. L’aéronef ne pourra peut-être pas monter dans tous les cas au FL360 du fait de sa charge et sa performance. Lors d’une phase de vol en début de croisière, les performances de montée d’un aéronef à un niveau plus élevé sont plus limitées qu’en fin de croisière (l’avion est plus léger du fait de la consommation en carburant).
Vitesse
La vitesse est un paramètre très important en contrôle en en-route. Un aéronef au-delà du niveau FL280, devrait se réguler en vitesse MACH (la limite peut varier entre le niveau FL245 et FL325 en fonction des conditions météorologiques).
Il faut savoir que lorsqu’un aéronef monte à vitesse indiquée constante (IAS) en nœuds (KT), à partir d’une certaine altitude il atteint sa vitesse air (TAS) maximum.
Au dessus de cette altitude, l’aéronef en montant maintiendra une TAS constante et sa vitesse indiquée chutera en fonction des performances de l’aéronef. Dans cette phase, le contrôleur gère la vitesse des aéronefs sous son contrôle principalement en vitesse MACH (qui est une certaine représentation de la vitesse air).
Si deux aéronefs volent à la même vitesse indiquée, l’aéronef ayant le niveau le plus élevé ira le plus vite.
Si deux aéronefs volent à Mach égal, l’aéronef ayant le niveau le plus bas ira le plus vite.
Régulation en-route
But de la régulation en-route
La régulation en route est la tâche principale du contrôleur en-route. Qu’est-ce que la régulation ?
C’est tout d’abord assurer la sécurité des aéronefs entre eux dans l’espace aérien et ordonner la circulation aérienne afin de constituer des flux de trafics.
La régulation en-route comprend les actions suivantes :
- Créer des flux d’aéronefs pour éviter les congestions des aéroports ;
- Raccourcir les trajectoires afin de gagner en efficacité en contrôle et en temps de vol si l’aéroport de destination le permet ;
- Réguler les vitesses des aéronefs entre eux dans les flux ;
- Sécuriser les dépassements et les croisements.
Croisement des aéronefs
Si les aéronefs doivent se croiser au même niveau de vol avec une séparation latérale inférieure à 15NM en espace contrôlé sous surveillance radar ou 15 minutes en espace contrôlé sans surveillance radar, le contrôleur doit changer le niveau de l’un des deux aéronefs au moins avec une séparation d’altitude de 1000ft minimum dans un espace RVSM (ils doivent se croiser de 2000ft minimum dans un espace non-RVSM).
La séparation minimale en contrôle radar de 5NM latéralement au minimum ou 1000ft au minimum dans les espace RVSM (2000ft dans les espaces non-RVSM) doit être respecté impérativement.
Le changement de niveau des aéronefs doit être dans tous les cas anticipé par le contrôleur au minimum plus de 15 minutes avant le croisement effectif des aéronefs. Il est conseillé d’avoir la résolution du conflit avant une séparation latérale inférieure à 15NM sous contrôle radar.
Créer une régulation en croisière
Pour effectuer une bonne régulation en croisière, il faut savoir raccourcir les trajectoires en fonction des aéronefs adjacents ou ceux qui prennent les mêmes routes à la même altitude, il faut aussi gérer les vitesses des aéronefs pour éviter un resserrement des séparations.
Le but de la régulation est de créer un flux d’aéronef qui se suit tout en maintenant une distance stable.

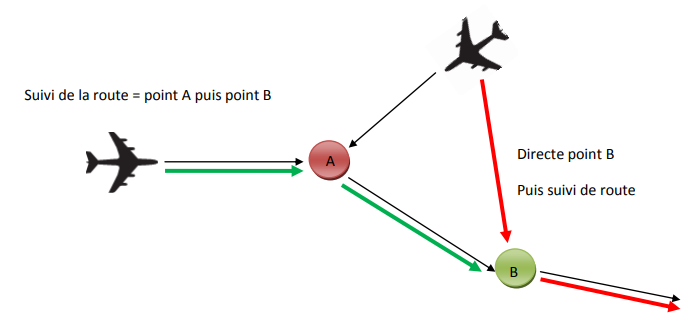
Suivant notre exemple ci-dessous, les 2 aéronefs ont la même estimée sur le point A au même niveau de vol venant d’une route différente mais, leur route est identique après le point A.
Les actions à mener sont :
- Laisser un aéronef sur la trajectoire publiée - généralement celui qui a la plus longue trajectoire ;
- Donner à l’autre aéronef une clairance directe sur un point plus éloigné afin de raccourcir la trajectoire et ainsi faire passer celui qui a la plus petite trajectoire estimée en premier ;
- Réguler ensuite les vitesses en fonction de l’espace ainsi créé entre les 2 aéronefs afin de maintenir une distance la plus constante possible sur la route.
Les difficultés et les paramètres importants que le contrôleur doit prendre en compte sont :
- Différence de vitesse de croisières ;
- Choix du point optimal de la directe (charge, capacité RNAV, …) ;
- Présence d’autres aéronefs qui impacte directement la régulation à faire.

Maintenir un flux d'aéronef sur une même route
En tant que contrôleur, vous devez vérifier la position des aéronefs qui volent au même niveau et sur les mêmes routes.
Le contrôleur doit en permanence surveiller les vitesses de chaque aéronef pour s’assurer que la régulation se maintienne. Il doit accélérer ou ralentir les aéronefs de telle manière à ce que les vitesses soit le plus proche possible.
Le contrôleur peut accélérer le premier aéronef s’il est dans la capacité de le faire et/ou ralentir le second aéronef afin que la vitesse sol (vue par le radar) du second aéronef soit inférieure ou égale à celle du premier.

Pour maintenir une séparation, nous devons agir sur les vitesses et avoir les rapports de vitesse suivant :
V1 ≥ V2 ≥ V3
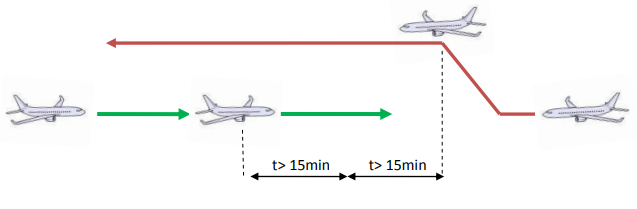
Généralement, la distance de séparation entre 2 aéronefs consécutifs sera supérieure ou égale à 15NM en croisière pour du contrôle en route sous surveillance radar.
Le contrôleur essayera dans la mesure du possible d’affecter un niveau optimal pour l’aéronef autant que possible (ni trop bas ni trop haut). Il essayera également d’assigner un niveau optimal de régulation afin d’éviter de changer le niveau des aéronefs en permanence. L’optimisation du nombre des clairances permet une meilleure surveillance radar et une meilleure anticipation.
Pour les zones non contrôlées ou contrôlées sans radar, les séparations doivent être supérieures à 15 minutes.
Si vous utilisez cette technique, il est recommandé de ne pas varier les vitesses plus de 0.2 point de Mach pour ne pas pénaliser la croisière des aéronefs. Ceci peut être utilisé pour plus de deux aéronefs si tant est que la distance entre chaque paire d’aéronef est suffisante.
Montée ou croisement en croisière
Avant d’arriver au niveau de croisière, tous les aéronefs ont une phase plus ou moins longue de montée.
Gestion de la montée ou croisement par altération de la trajectoire
Les montées des aéronefs doivent être gérées par le contrôleur sans palier à des niveaux intermédiaire autant que possible.
Gestion par altération de cap
Le contrôleur peut donner un guidage radar au détriment de la trajectoire pour amener un aéronef à son niveau de croisière (montée prioritaire au détriment de la trajectoire pour éviter un autre aéronef en conflit de trajectoire).